RESEARCH
MAKING
SCIENCE
HAPPEN
RESEARCH-READY MUSCULOSKELETAL sOFT ROBOTS
We build robots so that you can focus on your research.
musc
the only open-source modular musculoskeletal robotics toolkit






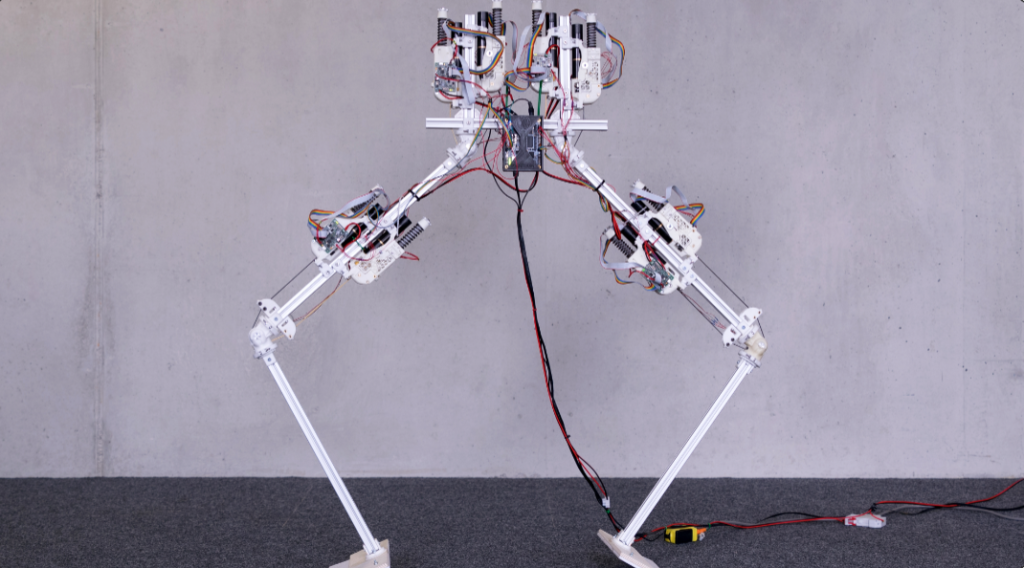
Musculoskeletal robot platform
a full scale humanoid robot research platform
MUSCULOSKELETAL ROBOTICS
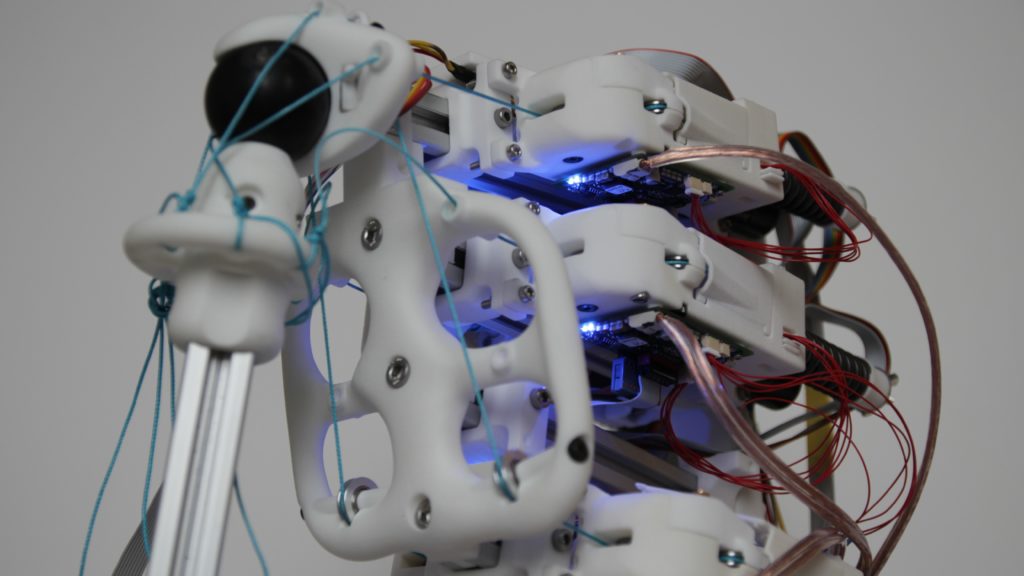
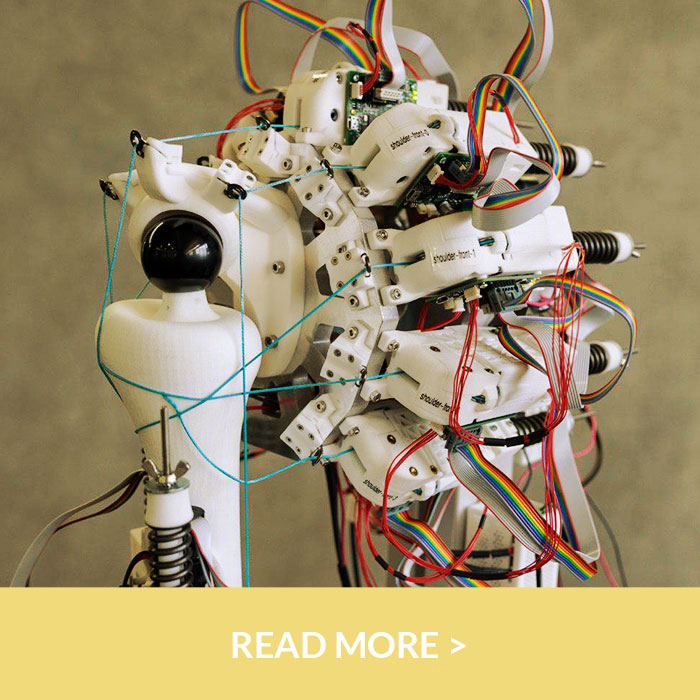
Compliant, musculoskeletal robotic systems offer several advantages, especially in situations where human and robot work in close proximity. A musculoskeletal design makes extensive use of elastic materials to emulate the muscles and tendons which enhance safety, dexterity and adaptivity in uncertain environments. It also allows reducing body weight and developmental cost, while at the same time increasing design flexibility.
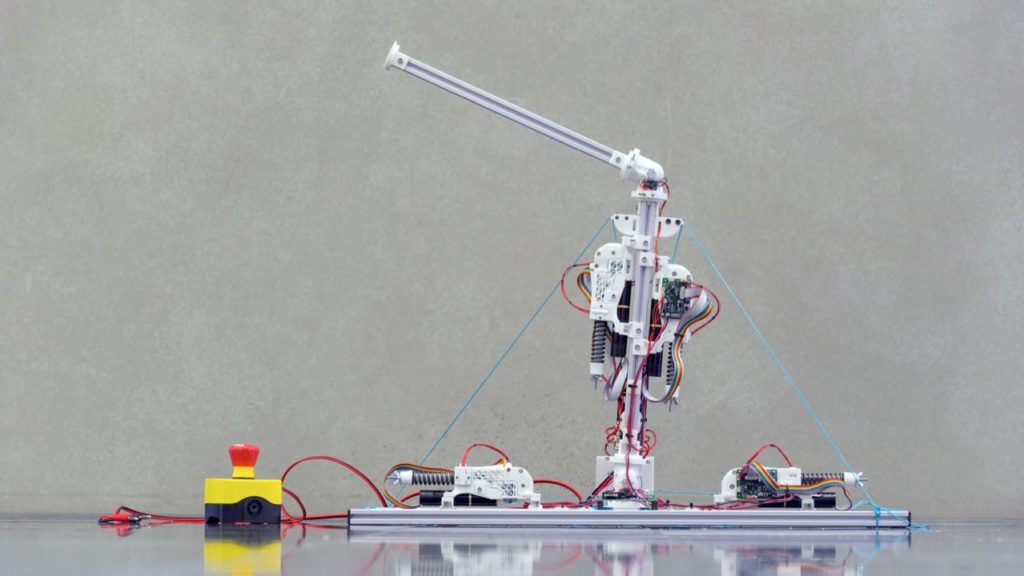
MUSC
Musc is the only open-source modular musculoskeletal robotics toolkit. Musc shows comparable behavior to biological musculoskeletal systems. It has many of the complex effects – pull only, tendon wrapping, hysteresis – that biological muscles have as well. Use it to simulate the effects of a change in muscle attachment or muscle strength. They are therefore ideally suited for a bio-plausible control pipeline in locomotor research, as a basis to build prosthetics and exoskeletons and as lightweight and safe co-bots.

COGNITIVE SYSTEMS
An important aspect of Roboy is to showcase it to the public and to make it fun and positive for people to interact with it. This is why we’re developing our own cognitive system with dialog system, speech-to-text and text-to-speech as well as a memory system. The system is designed to provide enough autonomy to give answers in all situations, but also to ensure structured dialogues for public displays.

SCIENCE COMMUNICATION
Inspired by the famous two-minute-papers youtube channel, the Roboy-Team is creating monthly videos that explain the newest research from Robotics! We’re also keeping a discussion on anything that happens in Robotics & AI on Telegram.

musculoskeletal robotics?
scalability in neural control



PUBLICATIONS
what it takes to make robots strong

CARDSFlow: An End-to-End Open-Source Physics Environment for theDesign, Simulation and Control of Musculoskeletal Robots
Simon Trendel, Yin Pok Chan, Alona Kharchenko, Rafael Hostettler, Alois Knoll, Darwin Lau

Compliant control for soft robots: Emergent behavior of a tendon driven anthropo-morphic arm
Georg Martius, Rafael Hostettler, Alois Knoll, and Ralf Der

A Joint-Selective Robotic Gripper with Actuation Mode Switching
Katharina Hermann, Rafael Hostettler, Markus Zimmermann, Anand Vazhapilli Sureshbabu

Musculoskeletal Robots: Scalability in Neural Control
Christoph Richter, Sören Jentzsch, Rafael Hostettler, Jesús A. Garrido, et al.
research collaborations
making science happen
The team of over 100 students, doctoral candidates and graduates of the Technical University of Munich brings together experts from a wide variety of disciplines. Together with a network of scientists all over the world you have been working for years on the development of the humanoid robot. The Royal Institute of Technology in Stockholm (neuroprosthetics), the Chinese University of Hong Kong (algorithms for controlling the robot), Oxford University (loading of artificial tendons during their growth) and of course TUM (robotics & real-time systems, product development methods) are permanent cooperation partners.
OPEN SOURCE
KEEPING IT OPEN – IT’S THE ONLY WAY FOR RESEARCH
The development of Roboy (mechanic and software) is conducted open source. This means that all expertise, ideas, and inventions do not belong to one specific entity, and everyone will have the chance to advance Roboy’s technology.
All of the code and CAD files are freely available on GitHub under a very permissive license (BSD 3.0 and CC-BY 4.0).
The parts required to build Roboy are kept in our sponsored aligni.com instance at roboy.open-aligni.com.
The documentation of the work of the current individual teams is available on our team development space.
As the project is under heavy development, if you would like to have access, learn how to build your own, or contribute please contact team@roboy.org.
BE MUSC
Think Musc could be valuable in your research? Get in contact with us. We’re happy to help building or build for you.

Cognitive system
to say and what to say, that is the question!
The Roboy Dialog System (RDS) is a sophisticated software module representing the cognitive capabilities of the humanoid anthropomimetic robot Roboy. The goal of the project is to implement dialog routines and knowledge extraction for a realistic human-like conversation flow which is achieved by utilizing various behaviour models represented by the State Machine (RDSM) finite automaton defined via a certain Roboy Personality description (file). Within the particular conversation flow stages, the behavioral variability is obtained by extending and redefining the common RDSM State to produce a certain social interaction. The RDMS State both as actor and as reactor regarding the internally formulated output and externally acquired input.
The architecture of the Roboy Dialog allows for flexible configuration and achieving the dialog flow tight to the user needs. Inherently it is designed for the open-domain conversation, which allows to handle unpredicted user inputs. The system can be deployed in multiple scenarios, including



In addition, Roboy Dialog System is capable of sending facial expression commands or Roboy movement action calls.
For the general knowledge information access, the interface to the DBpedia is implemented, as well to the internal graph-based memory, that allows to persistently store information across dialog sessions.
ROBOY’S RESEARCH REVIEWS
robotics papers explained in 2 minutes


Roboy’s Nerd Club on Telegram!
Roboyans posting links and discussing them to anything awesome in Robotics & AI! t.me/RoboyNerdClub