SKINBOARD
I feel
you man!
vision
roboy feeeeeeeeeels
This project’s goal is to build a “skin” for roboy’s lower arm that is capable of detecting and locating pressure.
our goal
this semester we want roboy to …

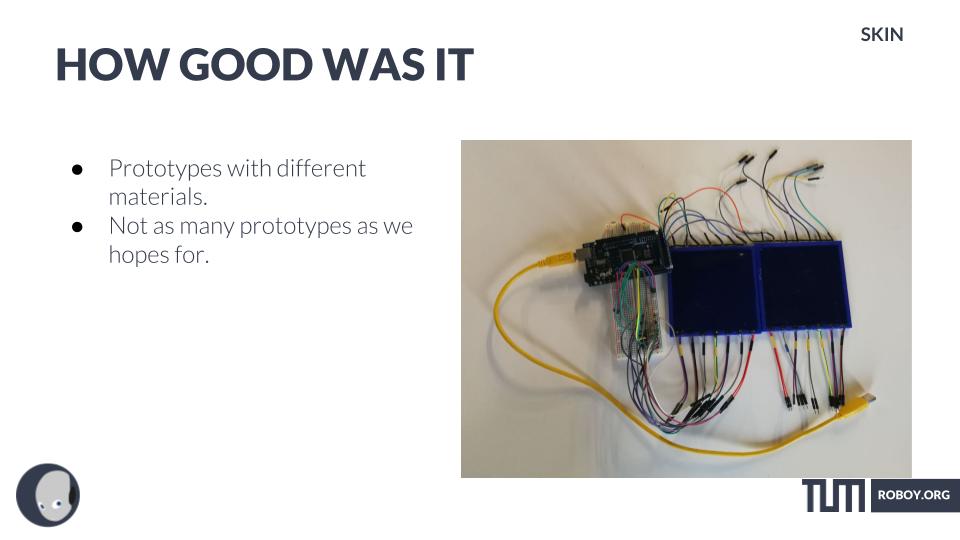
Build a prototype based on waveguides

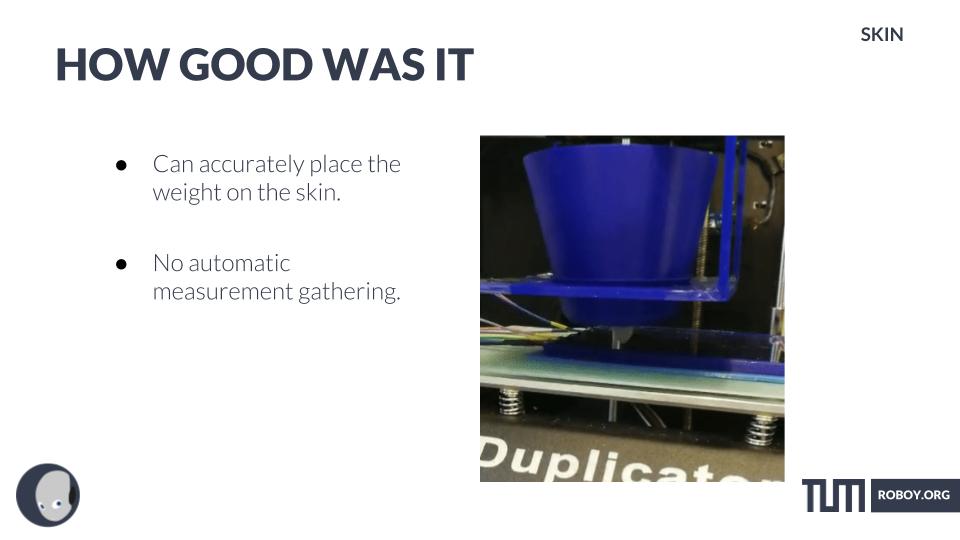
Build a test system for testing the skin
abstract
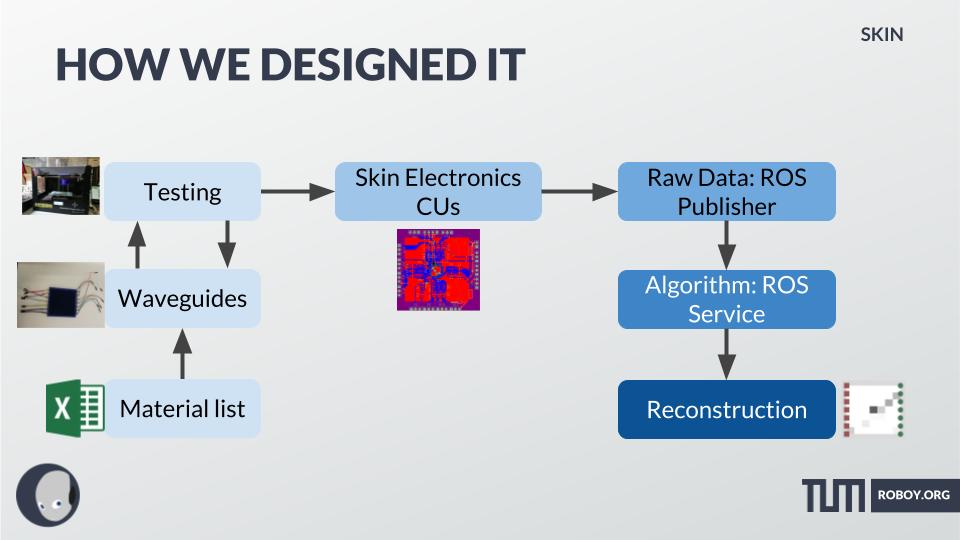
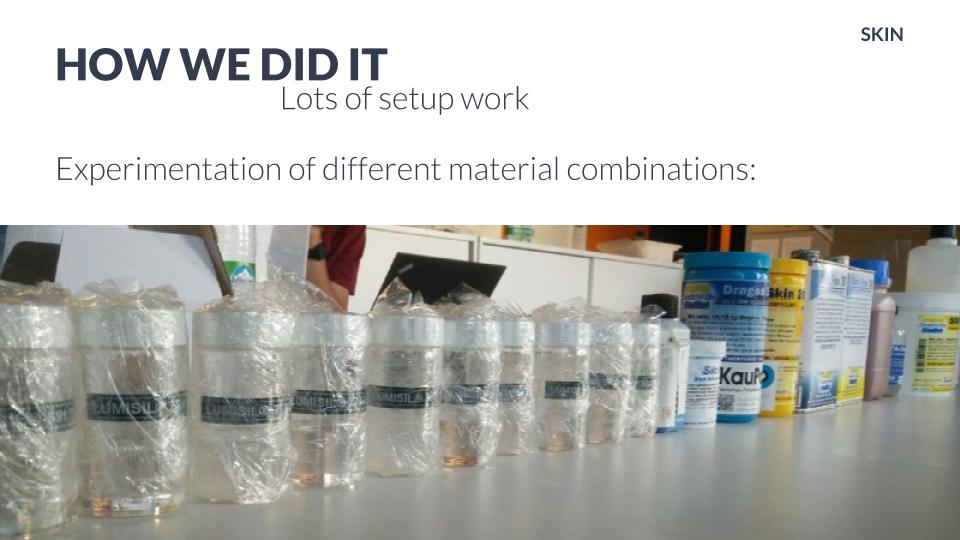
how we did it
PRESSURE-SENSITIVE SILICONE SKIN
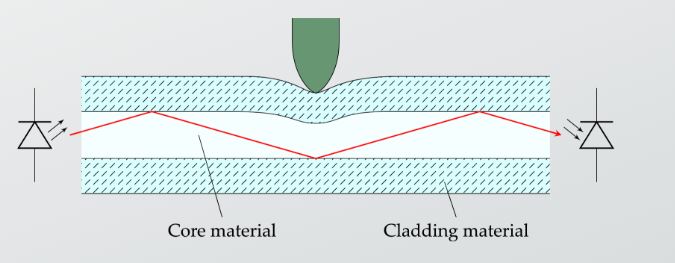
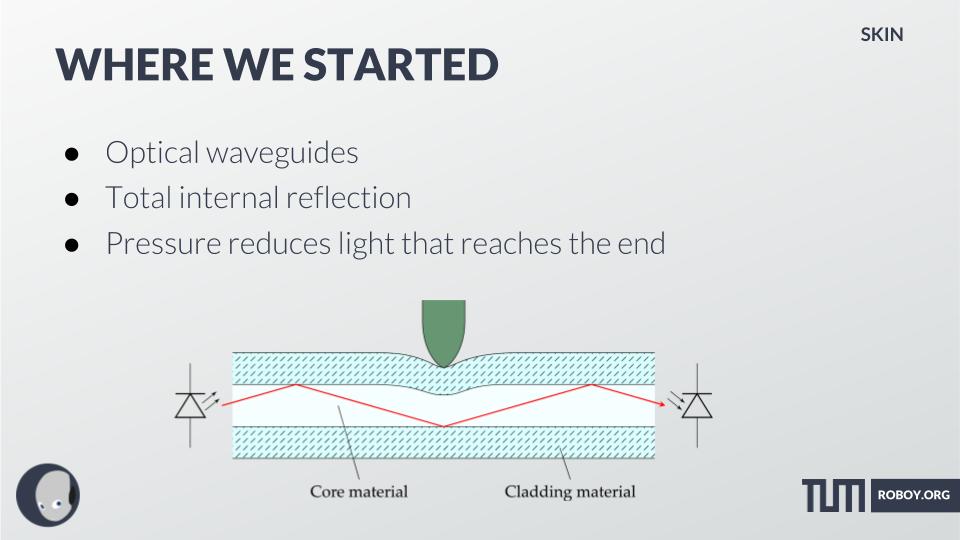
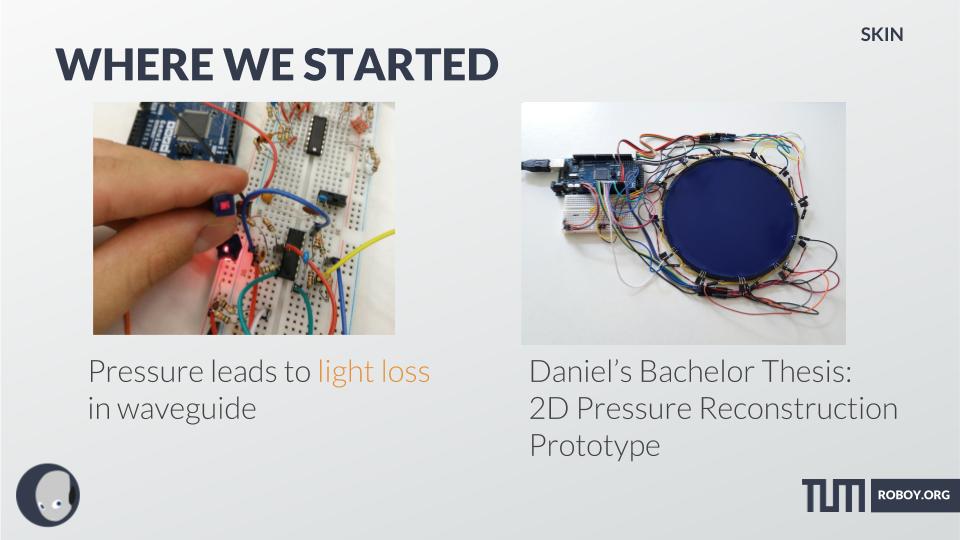
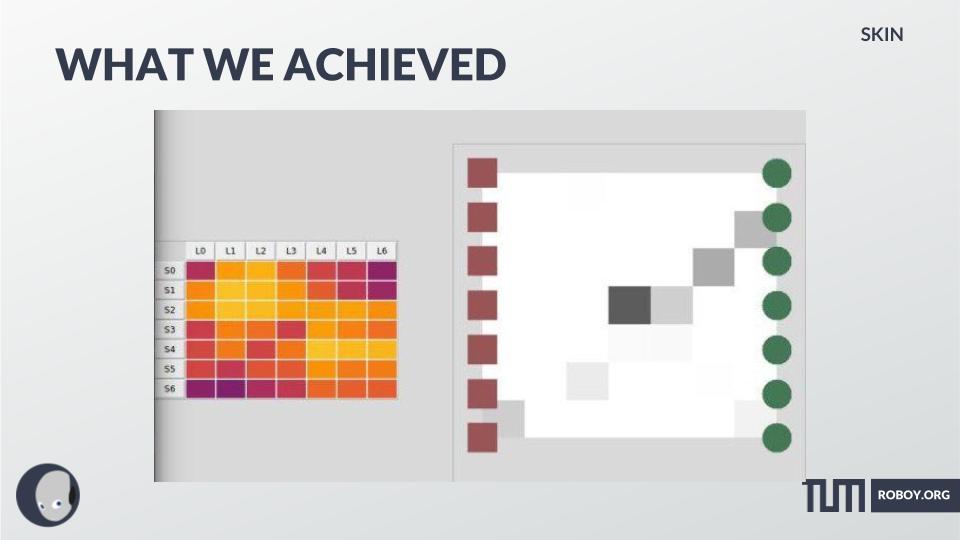
Our approach is based on flexible, planar silicone waveguides. The idea is that, similar to a normal optical waveguide, three stacked planar layers are made from flexible materials. The inner layer has a higher refractive index and is optically translucent. Thus, light sent into the inner layer is kept inside thanks to total internal reflection. When pressure is applied on the skin, the amount of light that can pass through is reduced due to the deformation of the skin, the pressure throws a “shadow”. Sensors placed all around can measure this shadow. By switching on LEDs all around the skin sequentially, we get pressure data from multiple perspectives. Using different algorithms, the location and intensity of the pressure can be reconstructed as a pressure map.
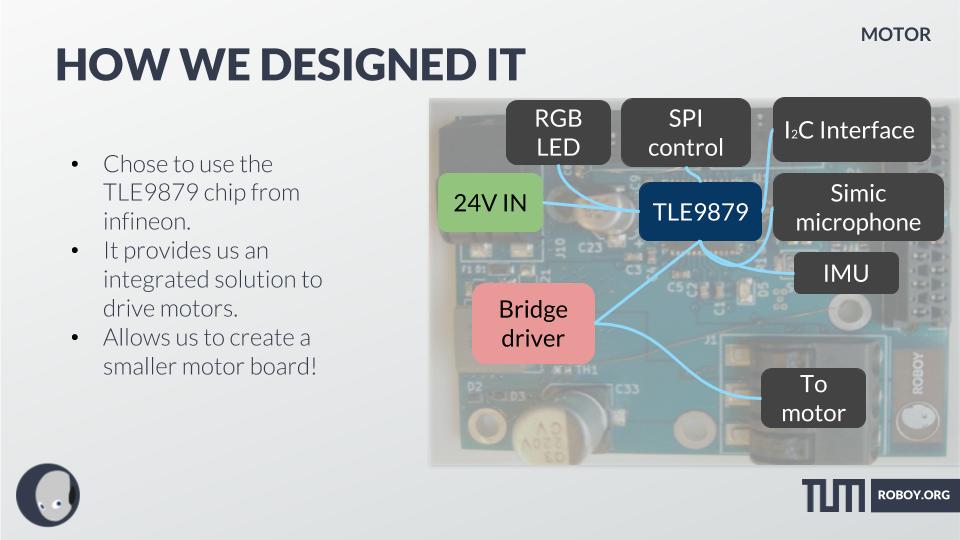
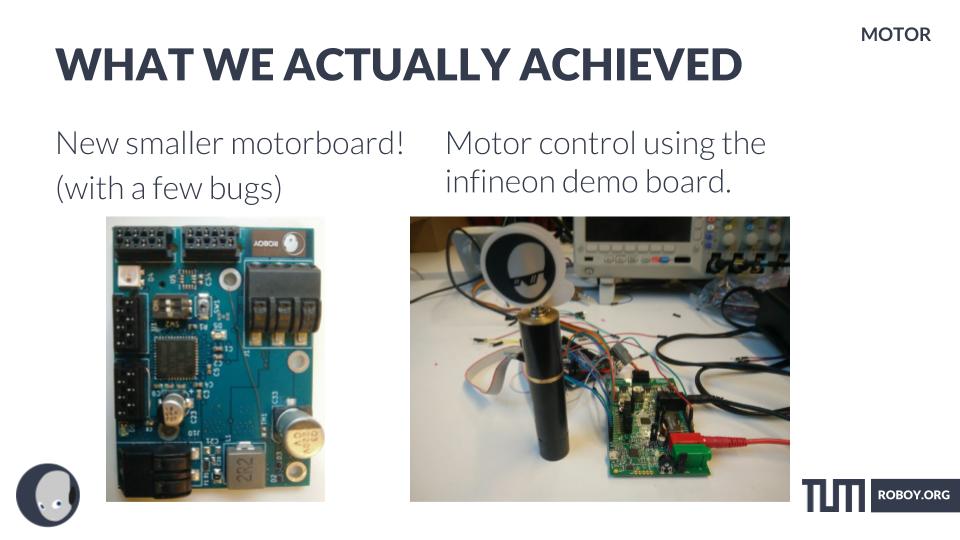
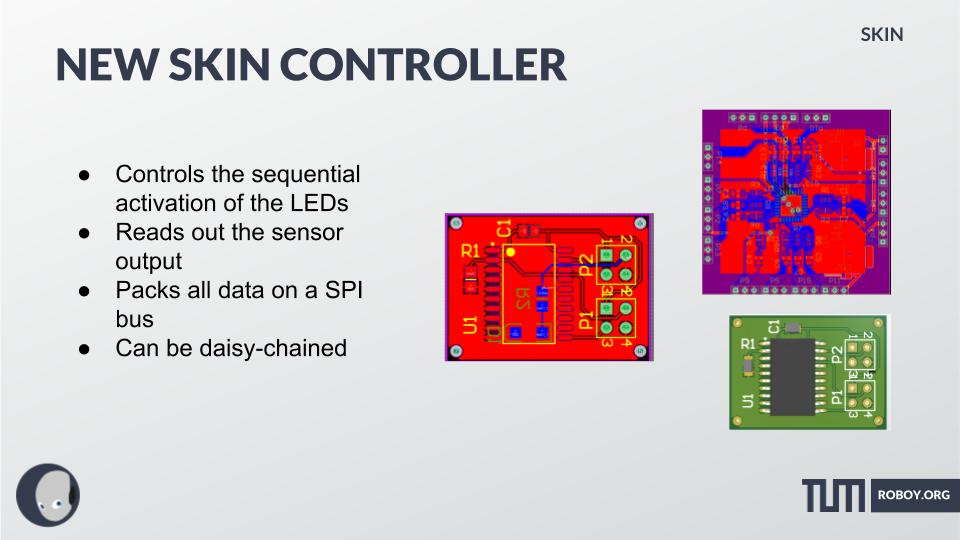
MOTOR BOARD
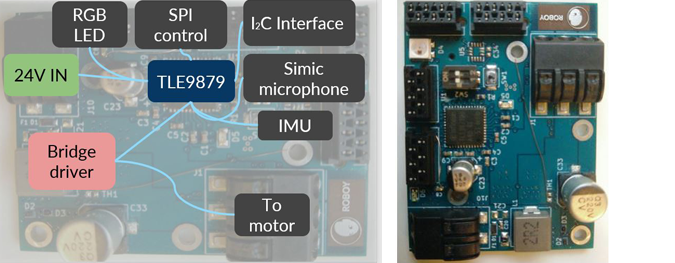
We chose to design the new motorboard using the TLE9879 from Infineon, as it provided us with an integrated solution to drive our motors, which allows us to create smaller, simpler motor boards. We managed to build a new motor board.
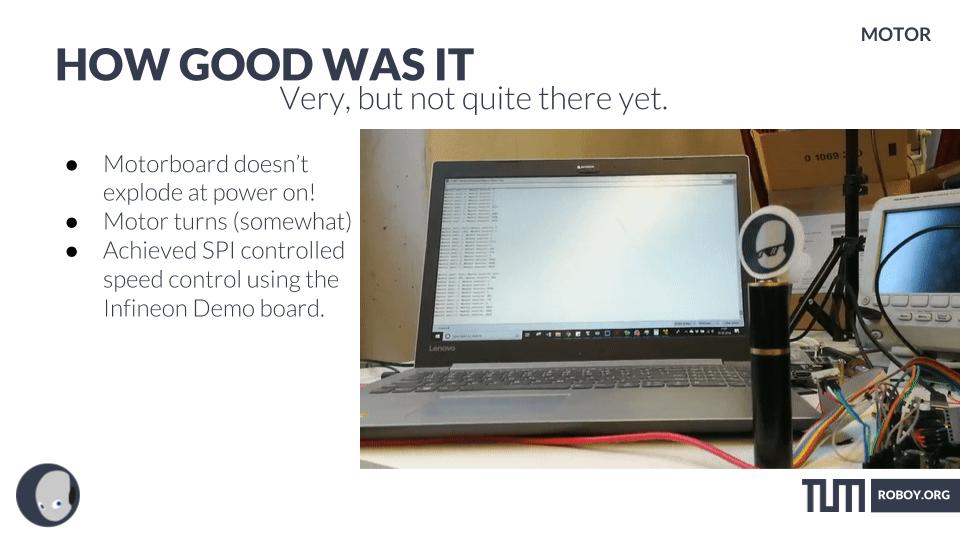
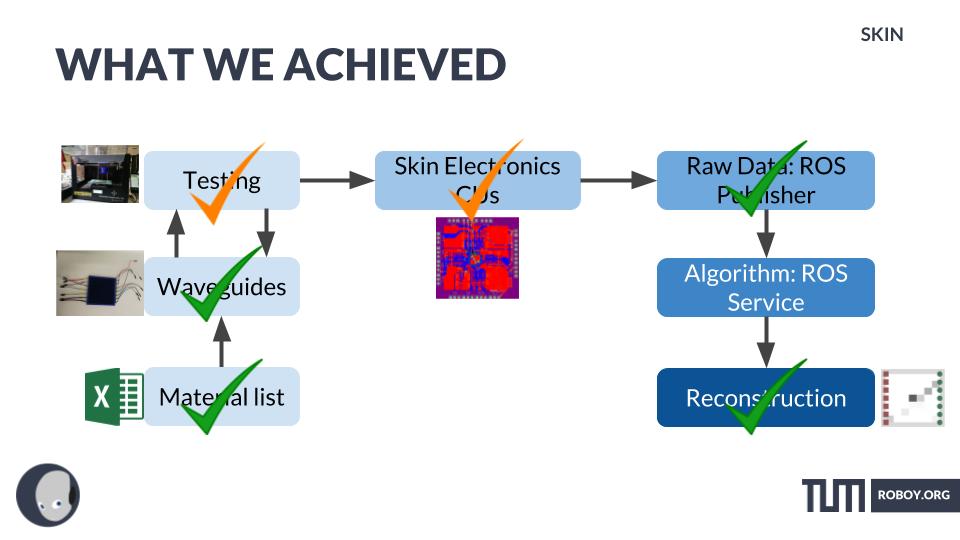
RESULTS
roboy’s skin can now…
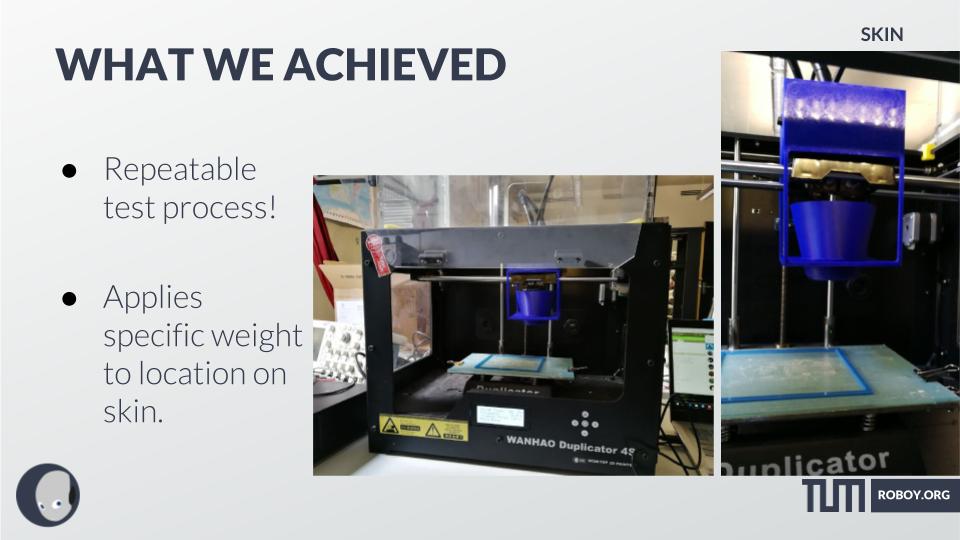
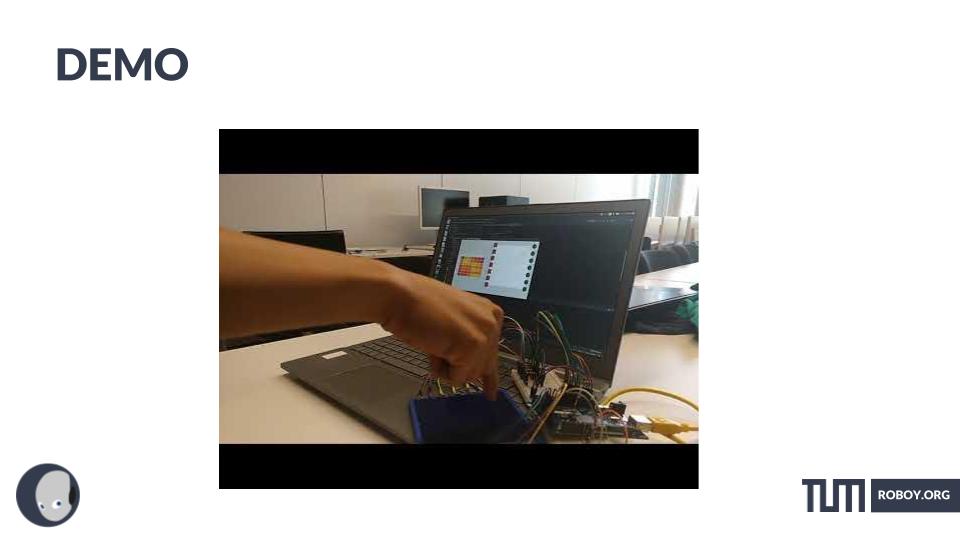
BE TESTED
Based on a 3D printer test system
FINAL VIDEO: SILICONE SKIN
FINAL VIDEO: MOTOR BOARDS
the team
get to know the skinboard team
TEAM MEMBERS SS2018
Mickey Wakefield (Team Lead)
Luis Vergara (Agile Coach)
Benjamin Jin
Daniel Schubert
Michael Sausmikat
Stephen Bullock
Xiao Chen

LINKS
cad files, documentations & presentations


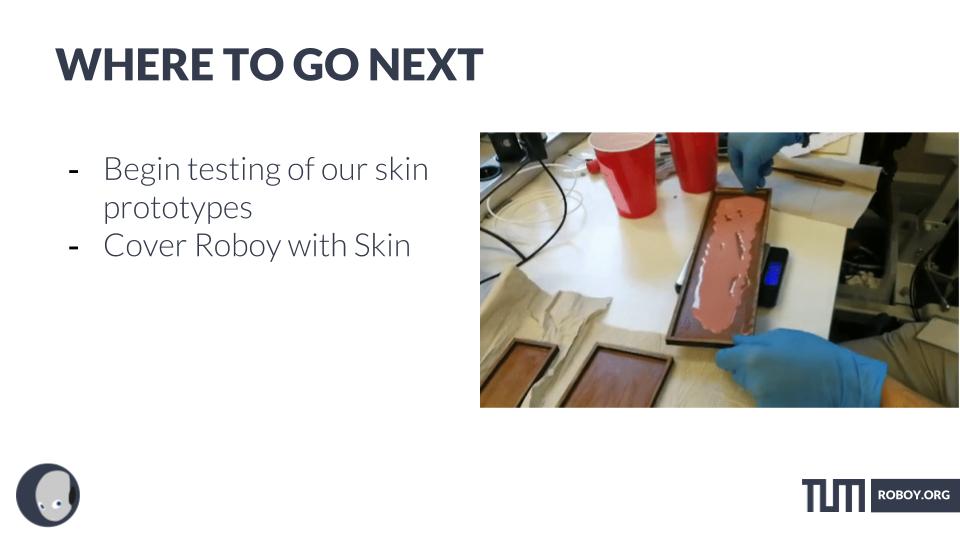

WHERE TO GO NEXT
for the motor board & sensitive skin
Motor board
Sensitive Skin
WANT TO JOIN A TEAM?
get in touch with us


