HAND
let’s high
five
vision
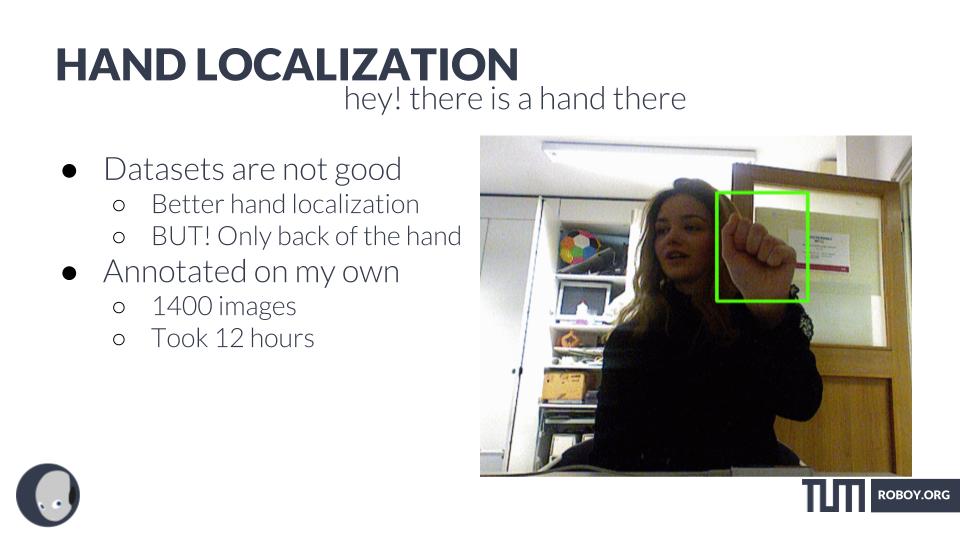
hey! there is a hand
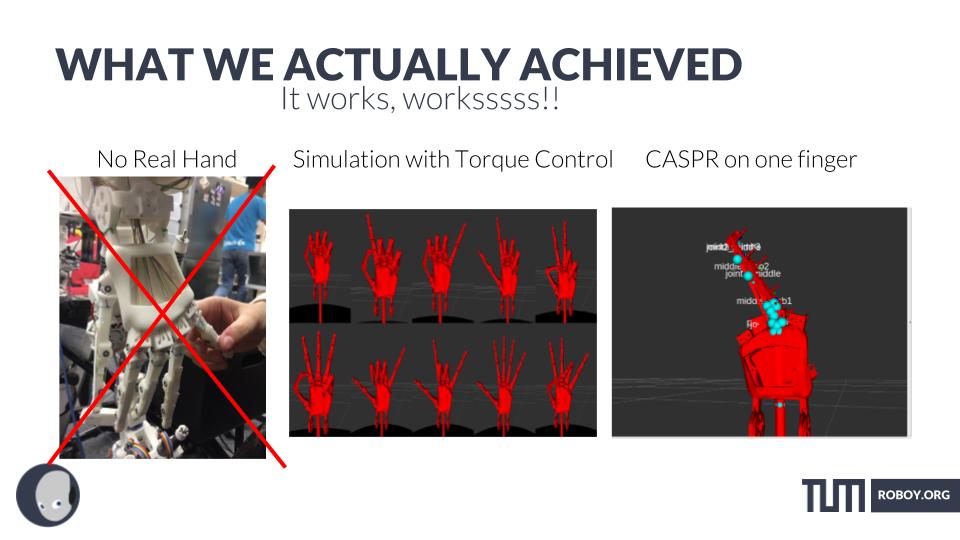
Our main goal in this Roboy Hand Project is to recognize gestures and mimic those gesture by executing via Roboy’s hand.
our goal
this semester we want roboy to …
Localize hands
abstract
how we did it
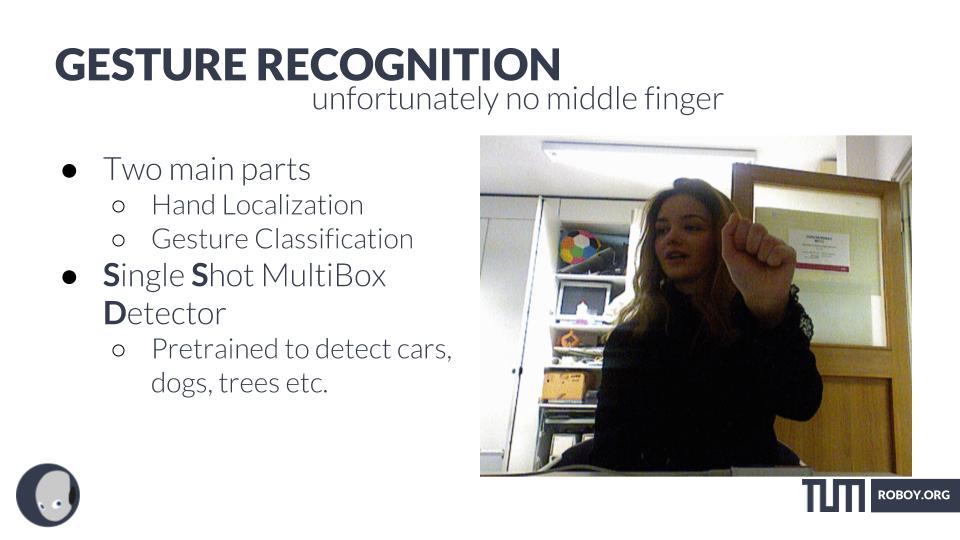
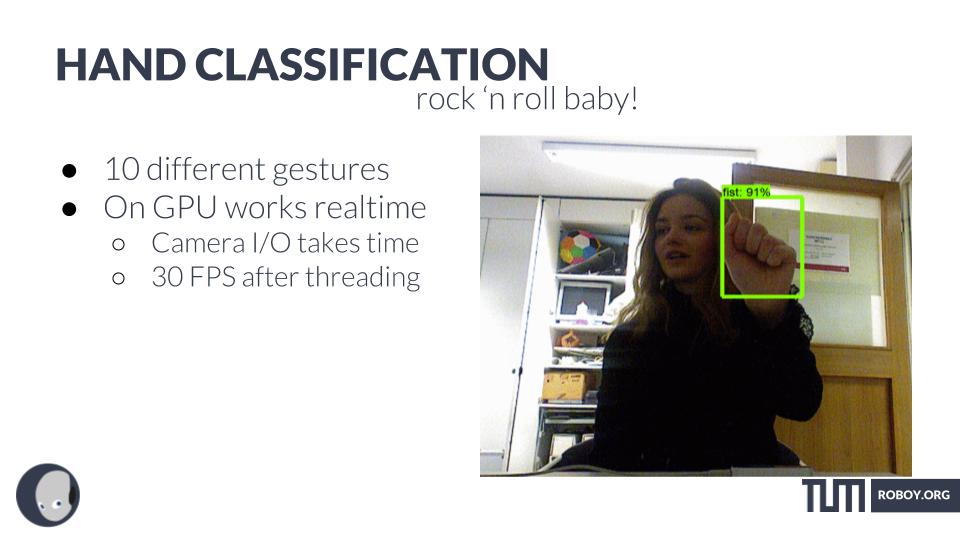
GESTURE RECOGNITION
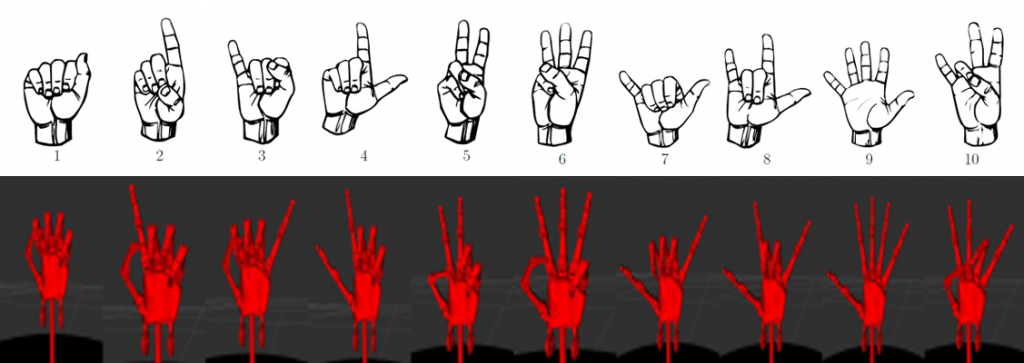
The aim of this part is to recognize a set of gestures. We decided to use deep learning architectures by using a ROS package which was a pretrained package for shape recognition. In order to train a good model, we need a good dataset. We are currently using a dataset (link) which provides both RGB and depth images.
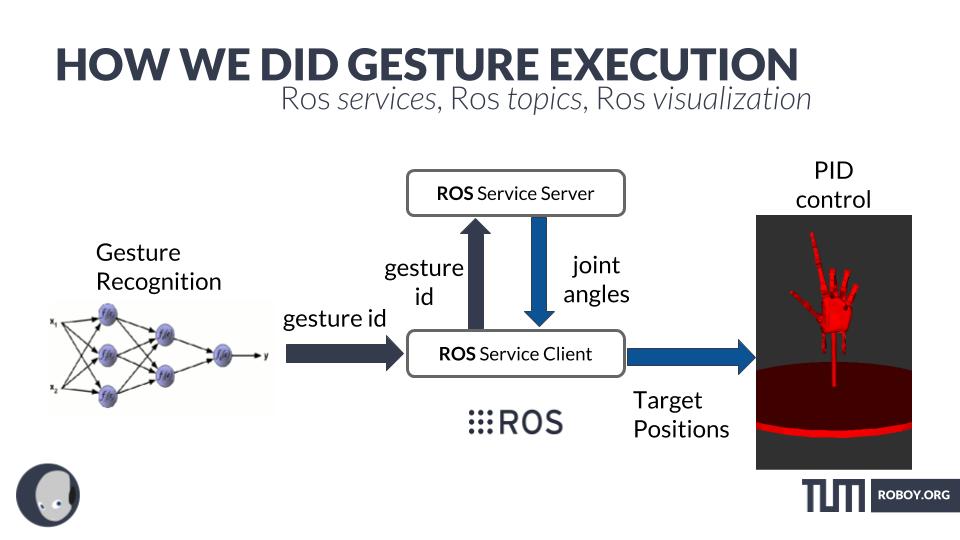
GESTURE EXECUTION
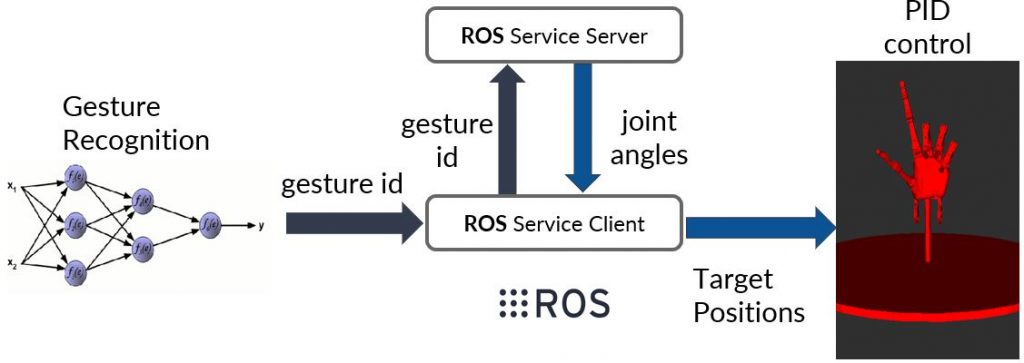
Recognition part will be connected to gesture execution via ROS. We have implemented the gesture execution to be able to receive the unique ID of different gestures. The received ID will first be sent to the ROS service client. Here, the client will send the unique ID to a service server to receive the joint angles of each finger. Then, this information will be sent back to the client.
RESULTS
roboy can now…
LOCALIZE HANDS
Localization & classification work in real time

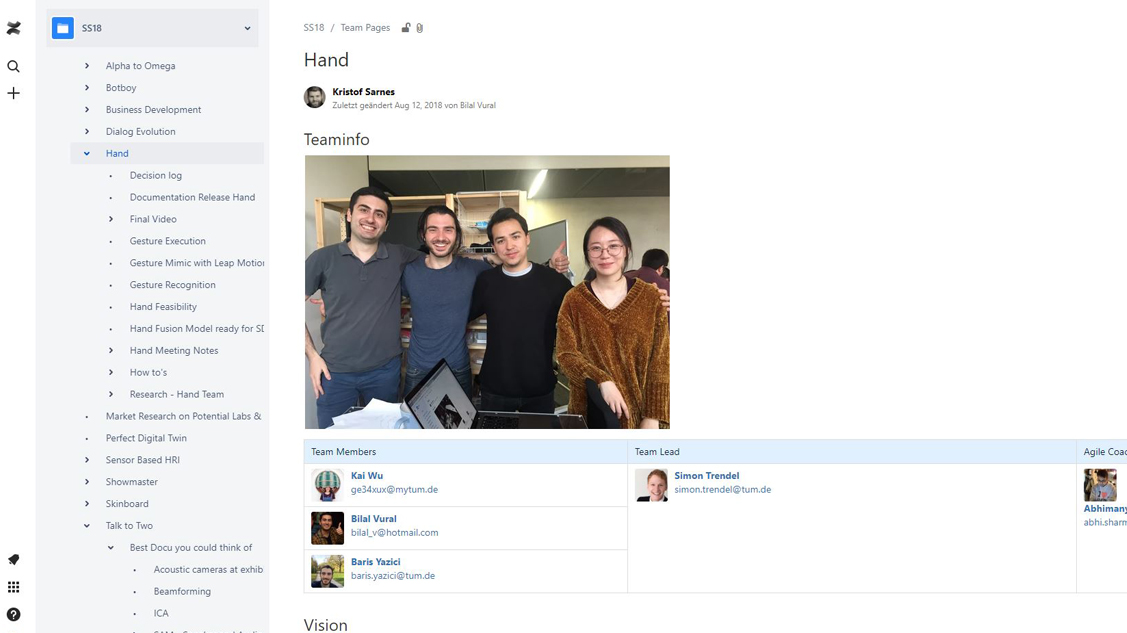
the team
get to know the hand team
TEAM MEMBERS SS2018
Simon Trendel (Team Lead)
Abhimanyu Sharma (Agile Coach)
Baris Yazici
Bilal Vural
Kai Wu
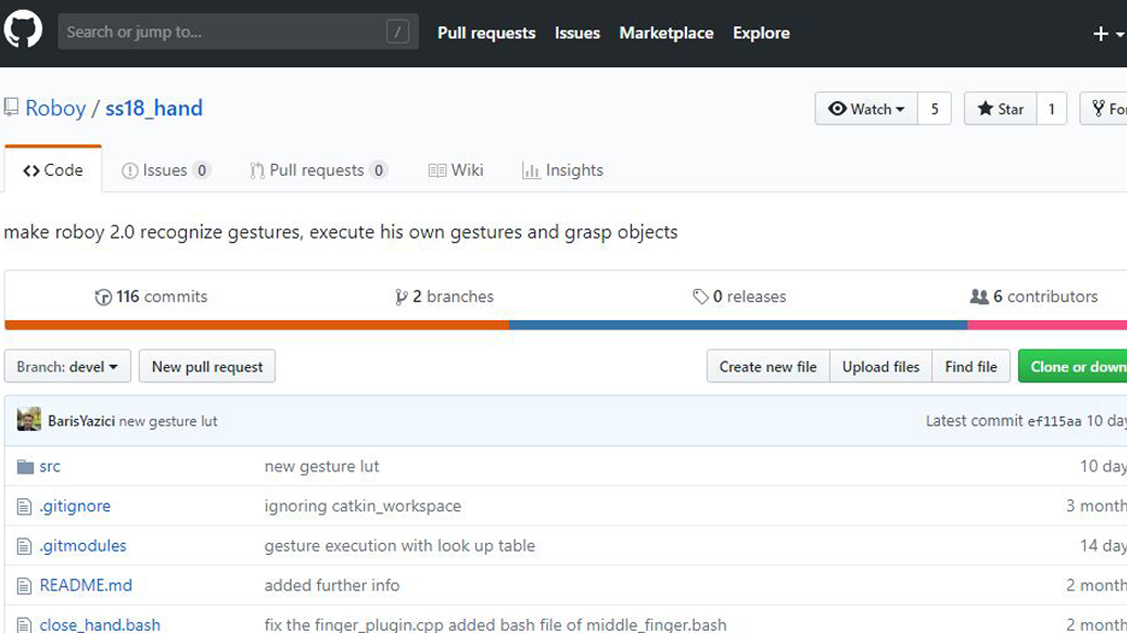
LINKS
cad files, documentations & presentations





WHERE TO GO NEXT
roadmap to turing test
Better Neural Network:
expand dataset with images from different angles
Real Hand Execution:
use learning algorithm for control

Stronger Hand:
more powerful hand to perform more tasks

Grasp Objects
WANT TO JOIN A TEAM?
get in touch with us


