MYOROBOTICS
ARM
let’s handshake
WHY MUSCULOSKELETAL ROBOTICS?
scalability in neural control
Compliant, musculoskeletal robotic systems offer several advantages, especially in situations where human and robot work in close proximity. A musculoskeletal design makes extensive use of viscous-elastic materials to emulate the muscles and tendons which enhance safety, dexterity and adaptivity in uncertain environments. It also allows reducing body weight and developmental cost, while at the same time increasing design flexibility.
myorobotics toolkit
a toolkit that fits it’s user needs
Myorobotics toolkit is a modular and reconfigurable system for developing musculoskeletal robotic platforms. It allows researchers to confi gure hardware setups tailored to the needs and requirements of individual experiments. The toolkit consists of design primitives that mimic the functions of their biological equivalents and can be con figured into custom-made robots. The key hardware components are: bones, muscles, joints (with integrated perceptors), and ganglions.
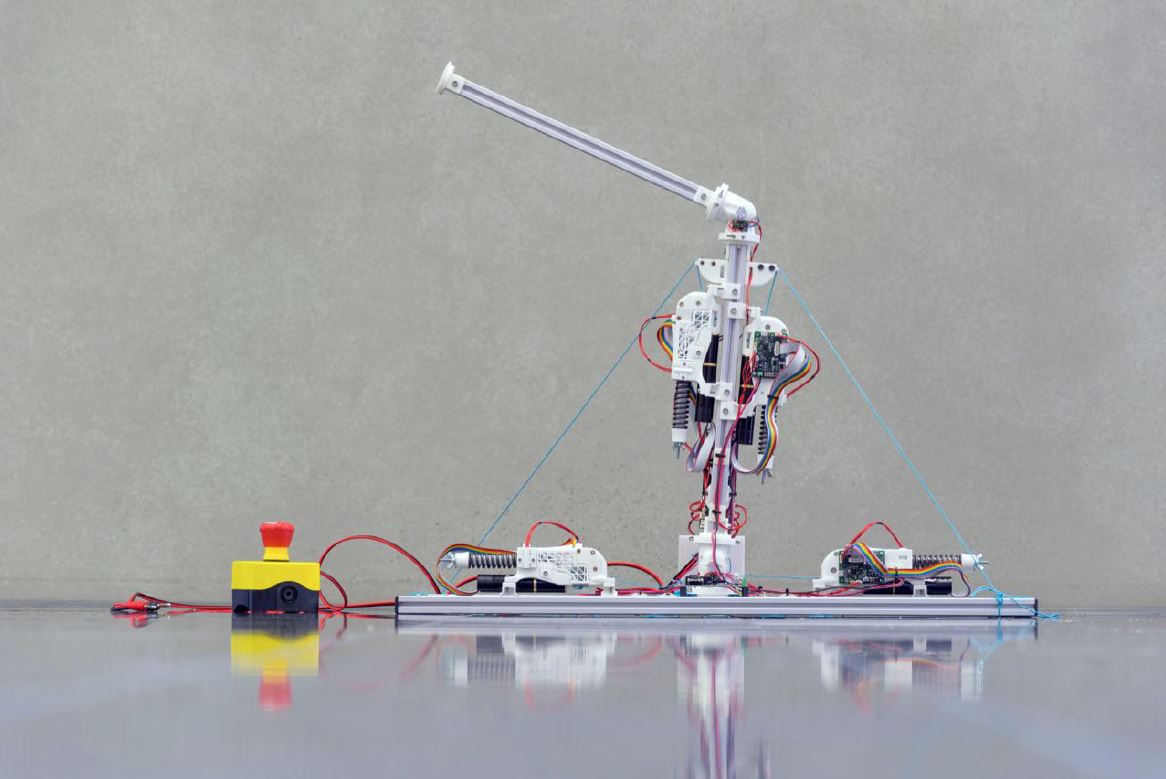
The Myorobotics system used, which consists of two MYO-muscles (matching elbow exor and extensor muscle groups in the human arm), a single DoF MYO-joint, and a MYO-ganglion.
The MYO-bone is constructed from a solid T-slot aluminum profile with an end adapter on each side on the bone. Muscle or joints can be attached in any place along the profile.
Thus, the structure provides low weight and high stiffness against torsion and bending. MYO-joints are passive mechanical connector modules, complementing the MYObone to form the skeleton of the robot.
To connect the lower and the upper arm (imitated using a forementioned aluminum profiles) hinge-type symmetrical joint was used. It provides one degree of freedom of rotation along an axis parallel to the joint end planes.
The joint uses ball bearing for low friction operation and is equipped with an absolute angle sensor, comprising a magnet embedded in one of the axis and an electronic board with located inside the joint.

Compliant control for soft robots: Emergent behavior of a tendon driven anthropo-morphic arm
Georg Martius, Rafael Hostettler, Alois Knoll, and Ralf Der

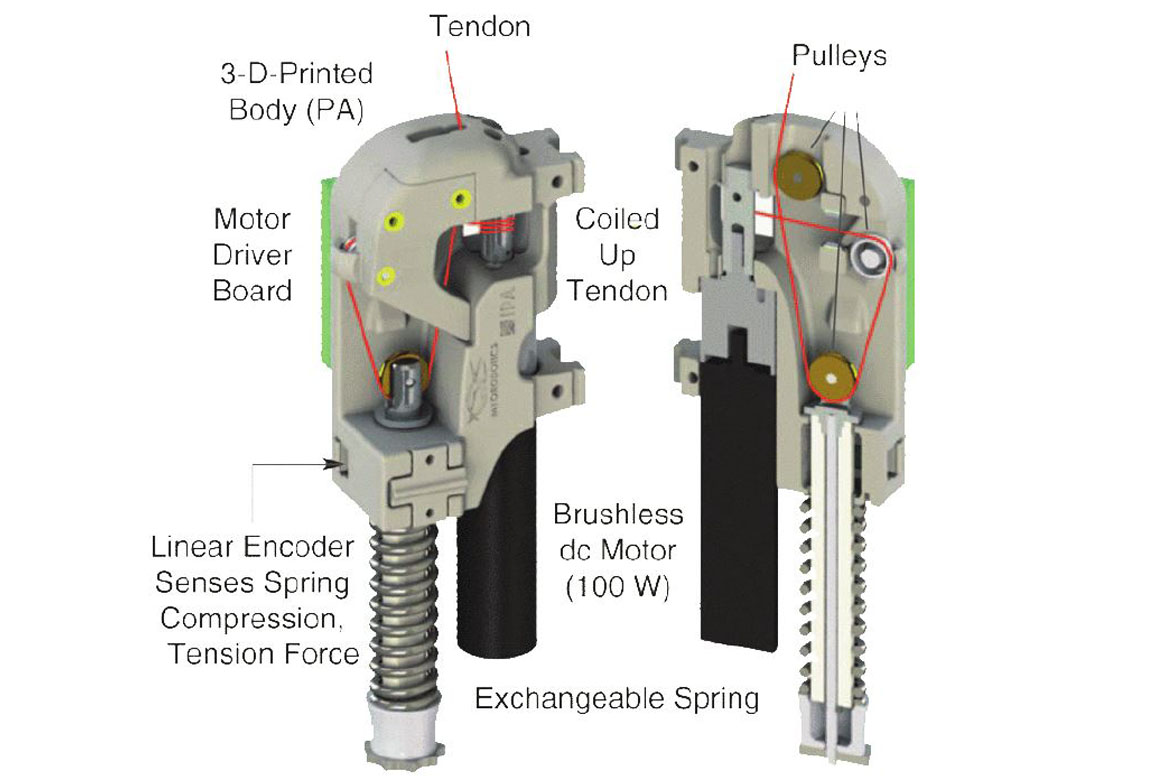
MYO-muscles are series elastic actuators that mimic skeletal muscle and thus they are the most notable distinction of Myorobotics w.r.t. conventional geared actuators. Instead of generating torques directly between two rigid links, MYO-muscle generates pulling force applied to the point of attachment on the bone. The body of MYO-muscle is made of 3D-printed polyamide, a 100 W DC motor (Maxon Motor EC series) is employed as an active force generator, that coils up a cable (equivalent of the biological tendon). The latter is connected through a set of pulleys to a spring-loaded guiding rod, that results into non-linear progressive spring behavior. An adjustable elastic element (a spring) connected in series with the contractile element (a motor). These are integrated, together with a sensor measuring de ection of the spring (hence the muscle generated force).
In addition to compliance, the MYO-muscle design enables storage of elastic energy to achieve highly dynamic motion and leads to lower impact forces generated during unexpected collisions with the environment. Another peculiar property of the muscle units is the ability to only generate force under tension, not compression. Therefore, bidirectional actuation requires (similarly to human body) two antagonist muscle units.

Musculoskeletal Robots: Scalability in Neural Control
Christoph Richter, Sören Jentzsch, Rafael Hostettler, Jesús A. Garrido, et al.
THE MYOROBOTICS ARM IN ACTION
so much fun to work with



LINKS
cad files, documentations & presentations
interested?
please get in touch
Please write us if you are interested in any partnerships, events, schools, media, q&a. Roboy is waiting to hear from you.
