CARDSFLOW
CAble-Robot Design and Simulation workflow
CardsFlow
what is it?
CARDSFlow makes it easy to design cable-robots in CAD, export them and then simulate them in a robot simulator.
We use Autodesk Fusion 360 as the CAD program, Gazebo Sim as the robot simulator and CASPR for the cable analysis and control.
CARDSFlow is developed as a collaboration between the lab of Prof. Darwin Lau at Chinese University of Hong Kong and the Roboy Team. It’s is released open-source under the permissive BSD 3-clause license, in the hope to foster further research in cable-robots.
ROBOTS
supported by cardsflow
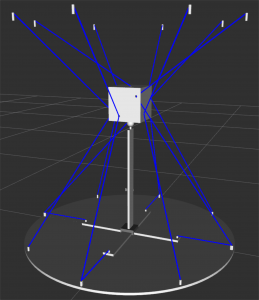
A free-floating cube test-platform
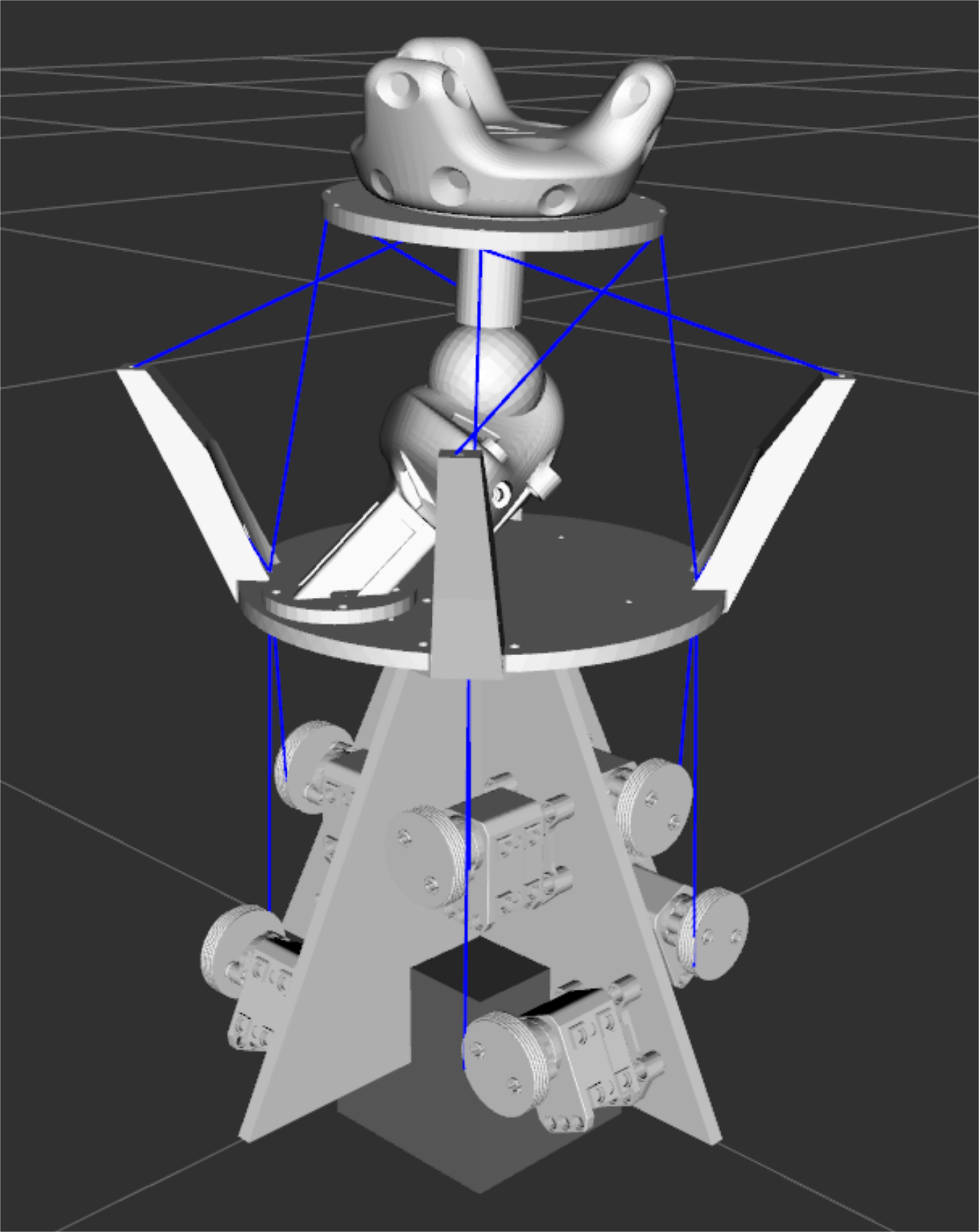
Roboy’s shoulder as a test-platform
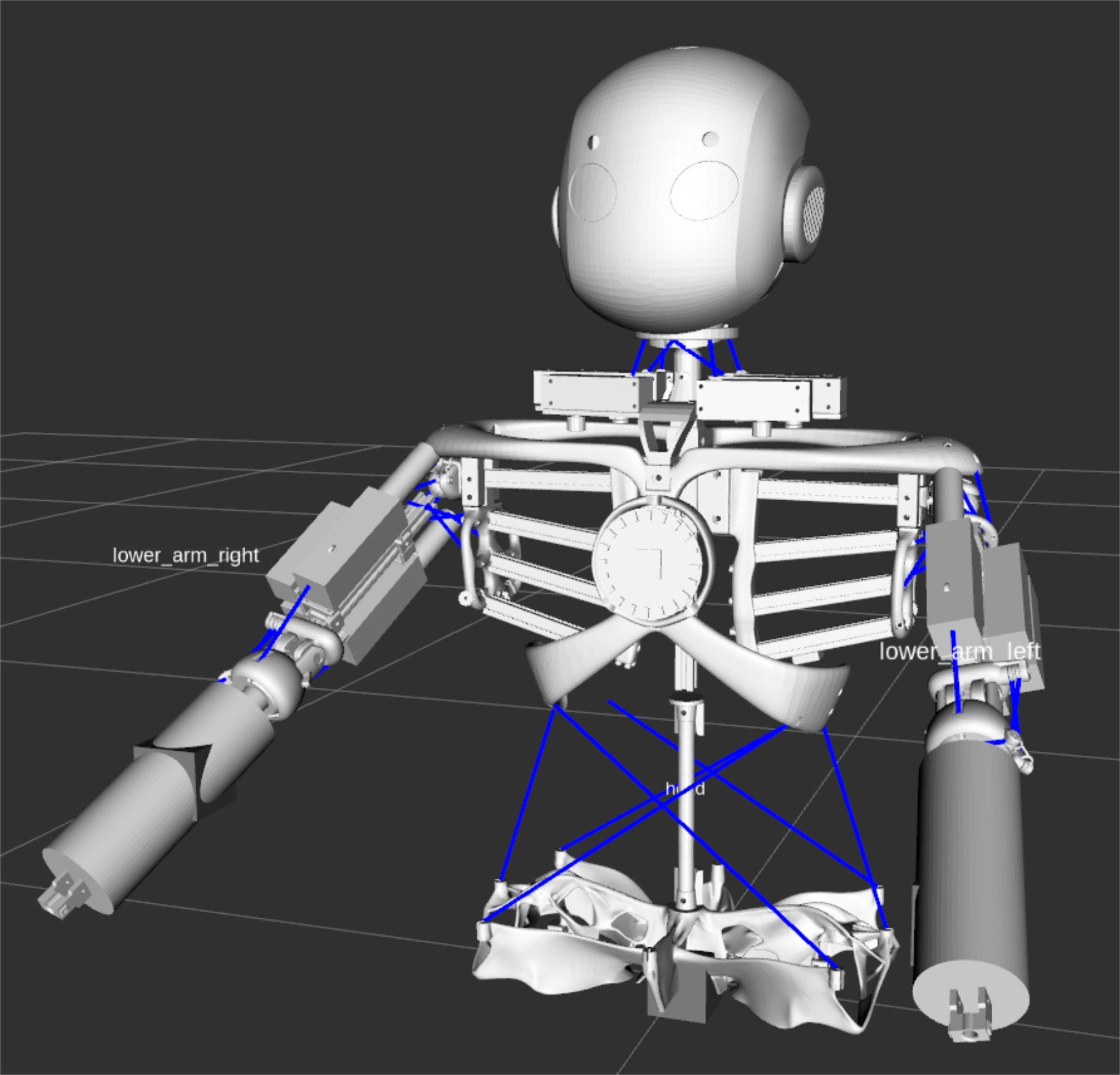
Full Roboy 2.0 torso
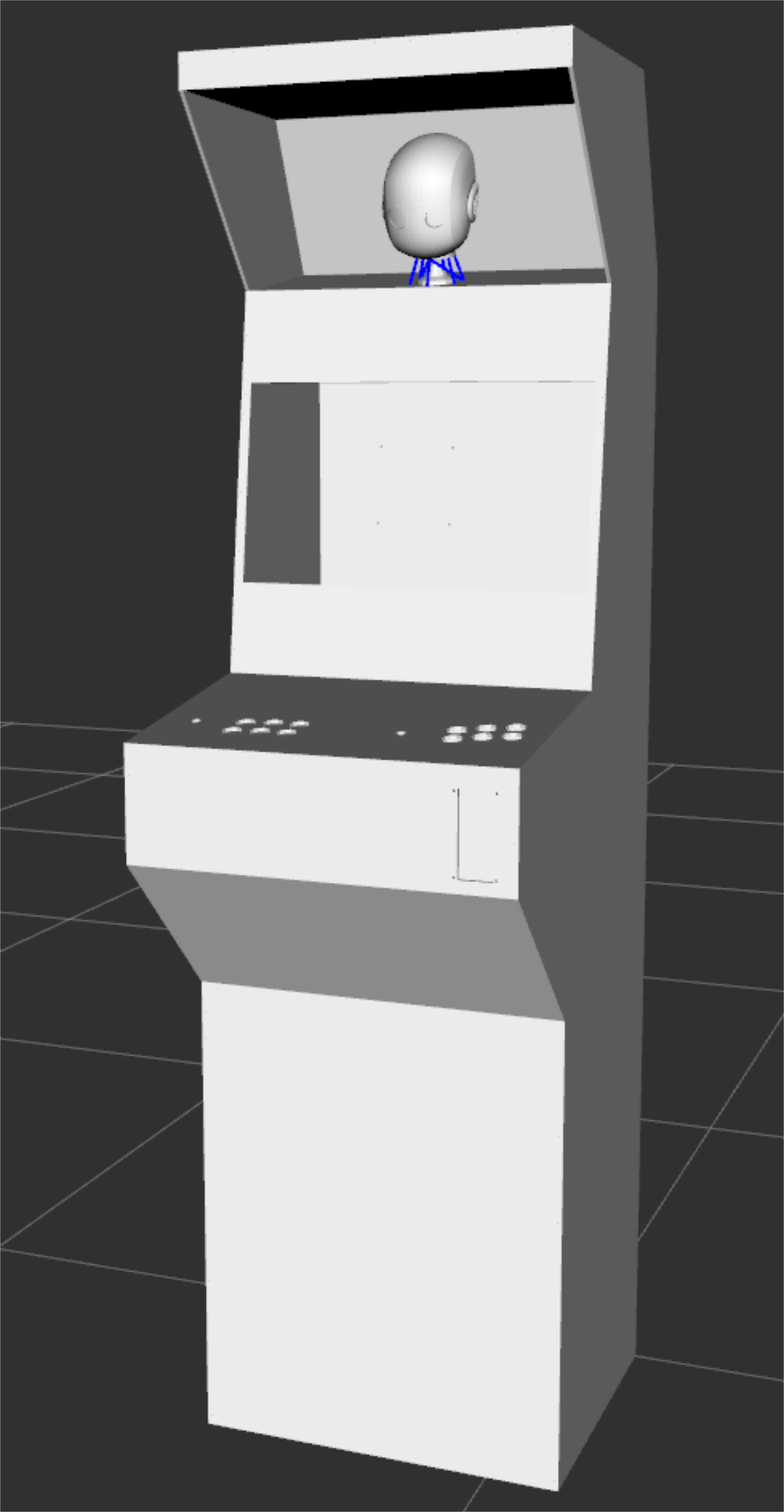
Our arcade machine has a head!
RESOURCES
to get started



cite as:
@article{cardsflow,
title={CARDSFlow: An End-to-End Open-Source Physics Environment for the Design, Simulation and Control of Musculoskeletal Robots},
journal={Humanoids 2018},
author={Trendel, Simon and Chan, Yin Pok and Kharchenko, Alona and Hostettler, Rafael and Knoll, Alois and Lau, Darwin},
year={2018}, month={Nov}}