Roboy
Parkour Challenge
An ambitious Goal
We all dream of having more time: time to spend traveling and exploring, time to read and learn, time to teach our children and have our children teach us, and we dream of time out – from the mundane, boring tasks that prevent us from becoming who we are truly meant to be as human. The task of robotics is to enable all of this to be possible, but progress in robotics is slow – robots remain expensive and one promising robot startup after the next dies simply because the best we can build does not provide enough value – robots are just not capable enough. Or too slow… so how about making robots more daring?
We believe that just as humans, robots grow with the challenge they’re facing – so it’s time for a new challenge. A challenge in the spirit of embodied intelligence, one that we humans easily cope with, but robots fail – and static stability is not an option:
The Roboy Parkour Challenge
Approaching a vision with a challenge
Biological musculoskeletal systems show locomotion performance in unstructured and complex environments which is still unparalleled and unmatched by any robotics solution today.
However, recent developments have shown promising new robots which exhibited dynamic locomotion in complex environments but are limited to very few labs worldwide.
To find broad application of such robots outside of pure research, they need to become more robust, cheaper and widely available.
In the past, international science competitions have shown a great potential to unify and compare performance and thereby accelerate research in the respective fields towards specific goals. Notable examples are the DARPA grand challenge in the early 2000s which kick started autonomous driving, the DARPA robotics challenge, the ongoing series of RoboCup challenges and numerous computer vision and AI challenges.
Embodiment
A central approach to build robots that interact with the real world is called embodiment. Instead of the classical approach of building rigid robots and then finding controllers that can handle the locomotion in the given environment, the approach of embodiment is to co-evolve the robots electromechanical system with the controller. This allows to offload tasks such as vibration dampening or shock absorption to material properties of the robot instead of requiring very high bandwidth control.
To date however, there are no challenges that explicitly lie the focus on this principle and it thus remains under-explored. We do believe however, inspired by the performance of biological musculoskeletal systems, that embodiment is a promising pathway towards agile robot locomotion in unstructured environments.
Anatomy of a good robotics challenge
Requirements
Solution
The ROBOY PARKOUR Challenge
Vision: Beat the fastest human on an inflatable parkour race track!
Approach: Establish base-line, start with a minimally solvable solution (any robot, in simulation, hard track), make harder (legged robots, real track, soft track), repeat until vision achieved.
Challenge structure
The challenge has been put on hold indefinitely due to the ongoing COVID-19 pandemic.
BASELINE ESTABLISHMENT – SINCE 7.9.2019
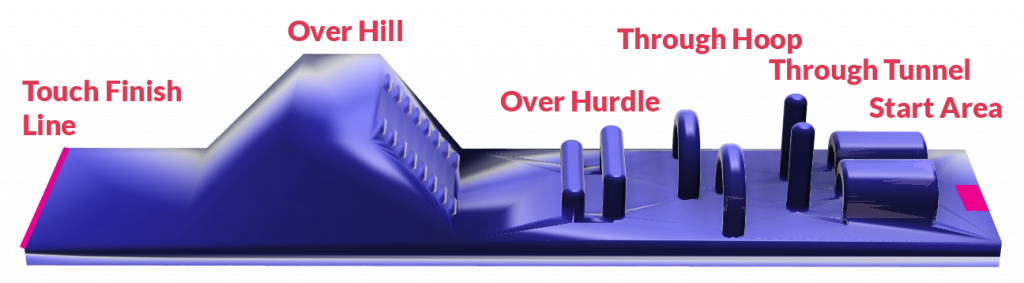
Collecting video, timing and motion tracking data to establish a human baseline performance and create a data set of dynamic interaction with the race track, with the additional goal to understand different strategies used by participants to tackle the obstacles, to sequence between obstacles and their short- and long-horizon motion/path planning.
Simulation Challenge
[wp-3dtvl model_file=”/wp-content/uploads/2019/09/RoboyParkourChallengeTrack-Simplistic-2019-09-19.stl”][/wp-3dtvl]
Given the 3D model of the track, build a simulated robot that gets through the track fastest.
The “robots” in this simulation challenge comprise of an arbitrary combination of rigid shapes, with arbitrary geometry, connected by rotary or ball-in-socket joints.
The robot and the simulation needs to satisfy to constraints on the right.
Scoring: The summed time of the best 8 out of 10 runs. Runs where the robot falls off the track are counted as equivalent to the slowest run + 10s per run.
Resources
PHYSICAL CHALLENGE
buting to this challenge, please reach out at win@roboy.org – we estimate an earliest possible start of the challenge in Q3/2022.
FAQs
The initial runs are targeted at interested researchers and labs in order to create a baseline interest. Later on we hope to build a community around these challenges whether more advanced hardware challenges for research groups and larger teams, whereas simulation challenges can be completed by individual researchers, student teams or even as part of class coursework.
We have a Telegram channel, which we use to discuss the competition: https://t.me/roboyparkourchallenge
Since the challenge will be comprised of a number of repeating smaller challenges the metric will be different for each round. Please check with their respective found that some going right now or upcoming to see how you can win.
We will make available all the data that record under CC-BY 4.0 license. Data depicting persons will either be anonymized or will have the necessary paperwork done to allow for release.
Most importantly, it’s something where we have no experience in robotics with, but humans are very good at. The traditional way of doing robotics is to reduce complexity as much as possible – creating so called lab conditions – and then trying to slowly expand to increasingly complex environments.
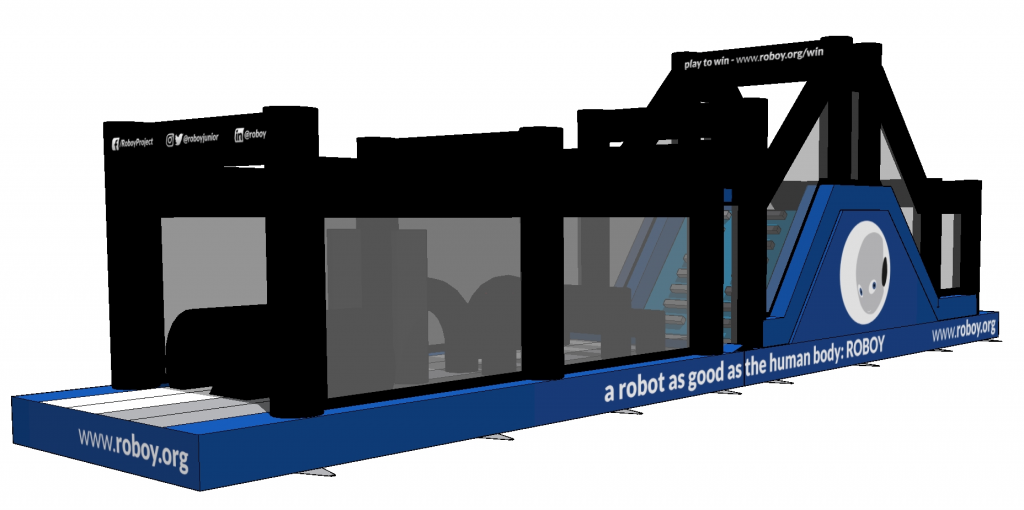
We believe that one underexplored variable is robot morphology. (I.e. changing properties of the robot bodies, including its morphology, kinematics, actuation, …), and those naturally cannot be explored in lab conditions, as the result is a function of the environment. A soft parkour track is the ideal middle-ground between lab conditions and the real world. Every team can simply buy one for an affordable price and thus has identical conditions. But the soft nature makes the task at hand variable and prohibits too simple solutions!
Tracks are being produced by Viva Inflatables BV in the Netherlands. You can either contact them directly or we can handle the logistics and deliver a track to your door for 6999€ + VAT. If you are interested in obtaining one, please drop us an email at: win@roboy.org
Currently, we provide a simplified rigid surface model and an accompanying SDF.
Live events
7.9.2019 – Roboy Finals
19. + 20.9.2019 – IEEE Conference of Cyborgs & Bionic Systems, Munich
During the IEEE Conference of Cyborgs and Bionic Systems, we officially announced the competition to the public.
Scientific Advisory Board
The board will be announced shortly.
Interested to shape this collaboration from a science perspective to help us achieve the goal? Write to win@roboy.org, we’ll be happy to have you involved!