ROBOTS OF ROBOY
JUNIOR, 2.0, 3.0 & MORE
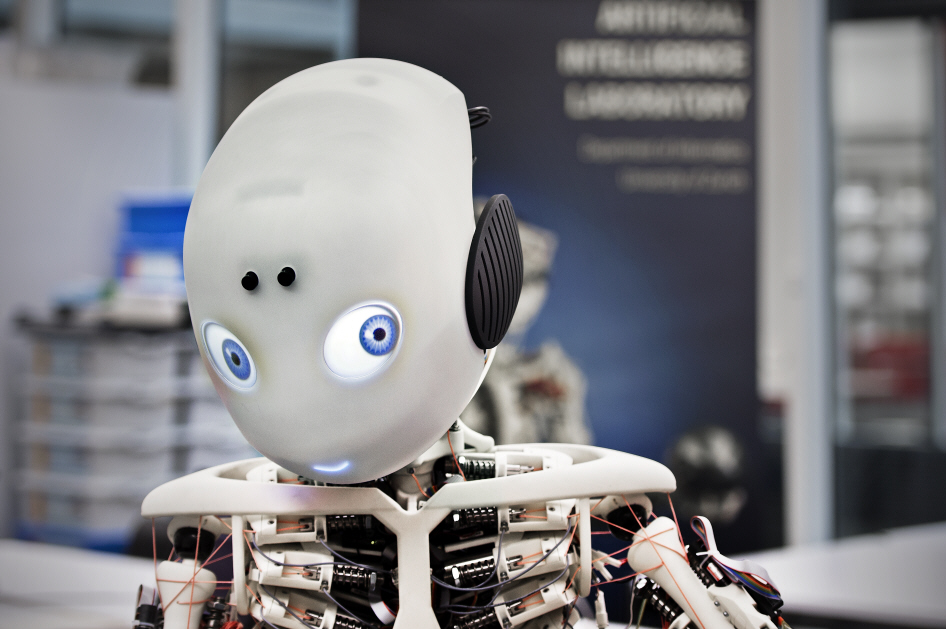
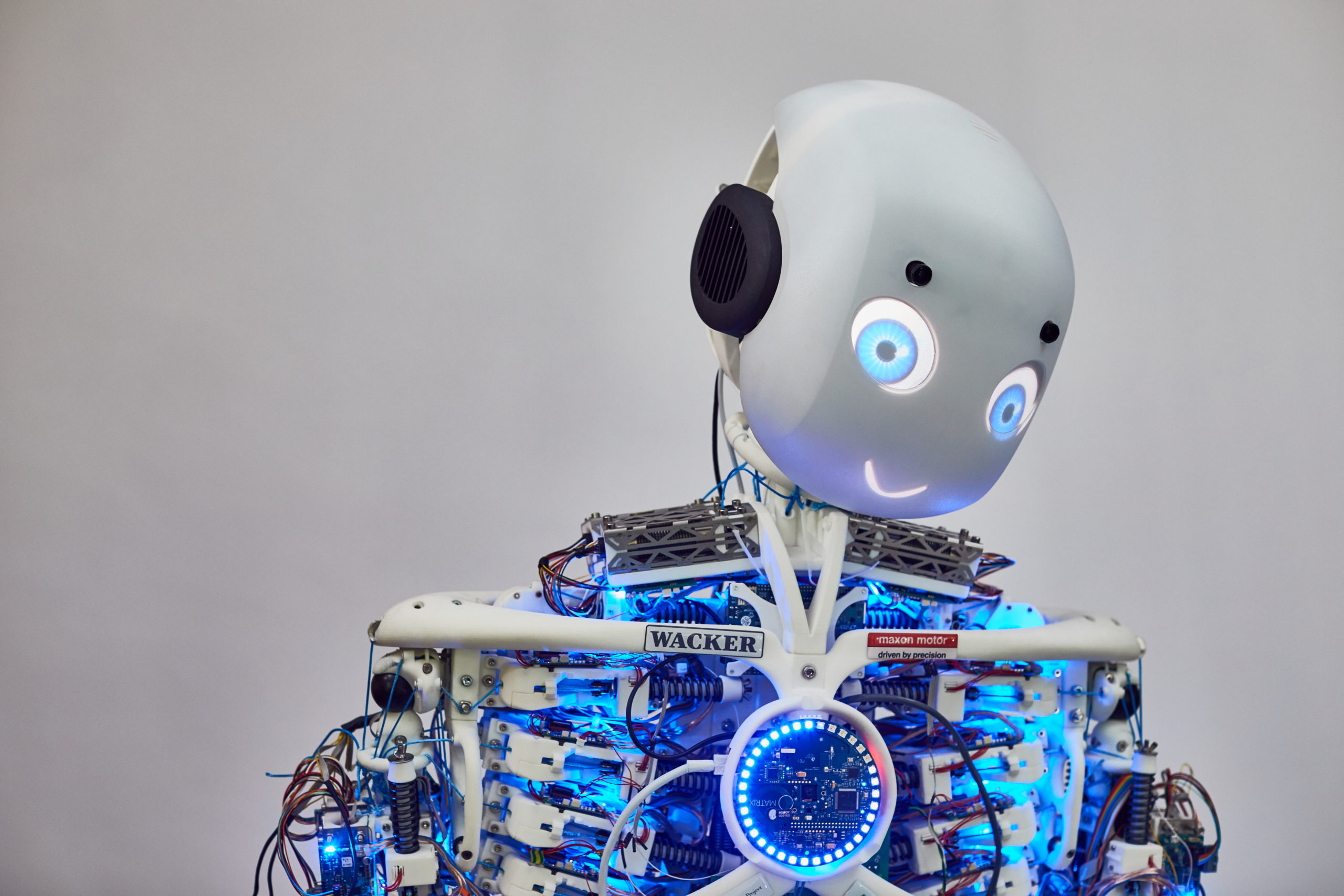
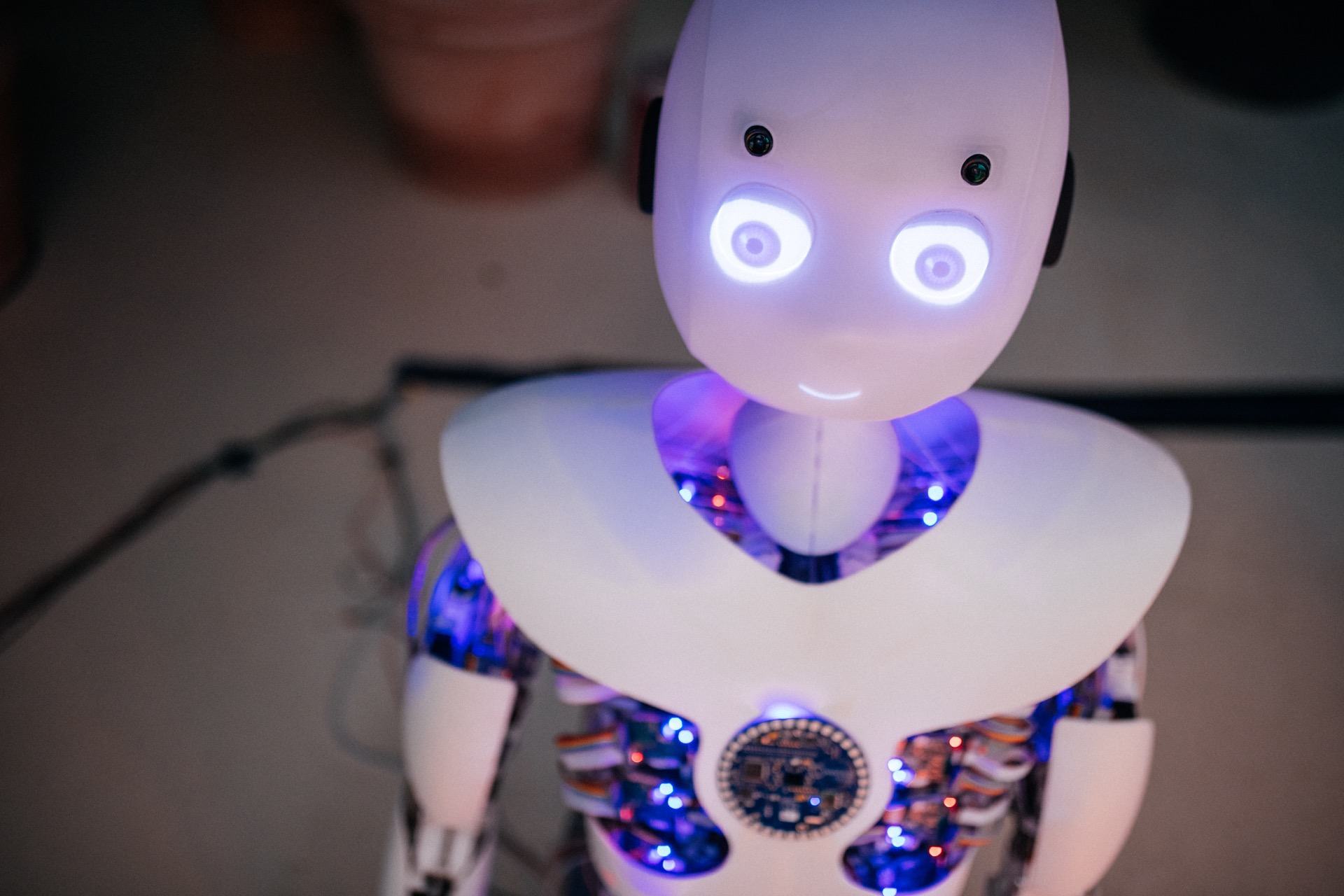
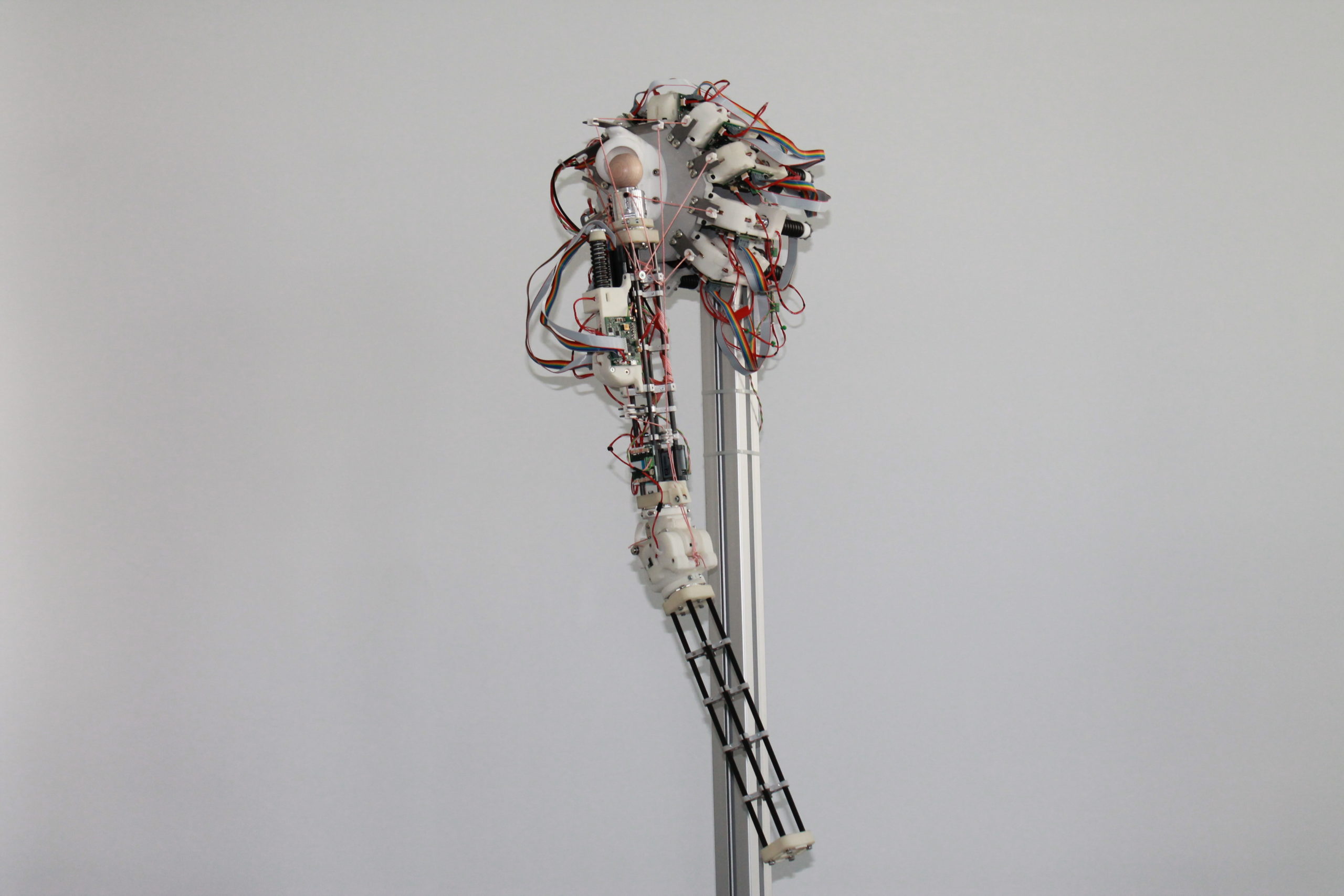
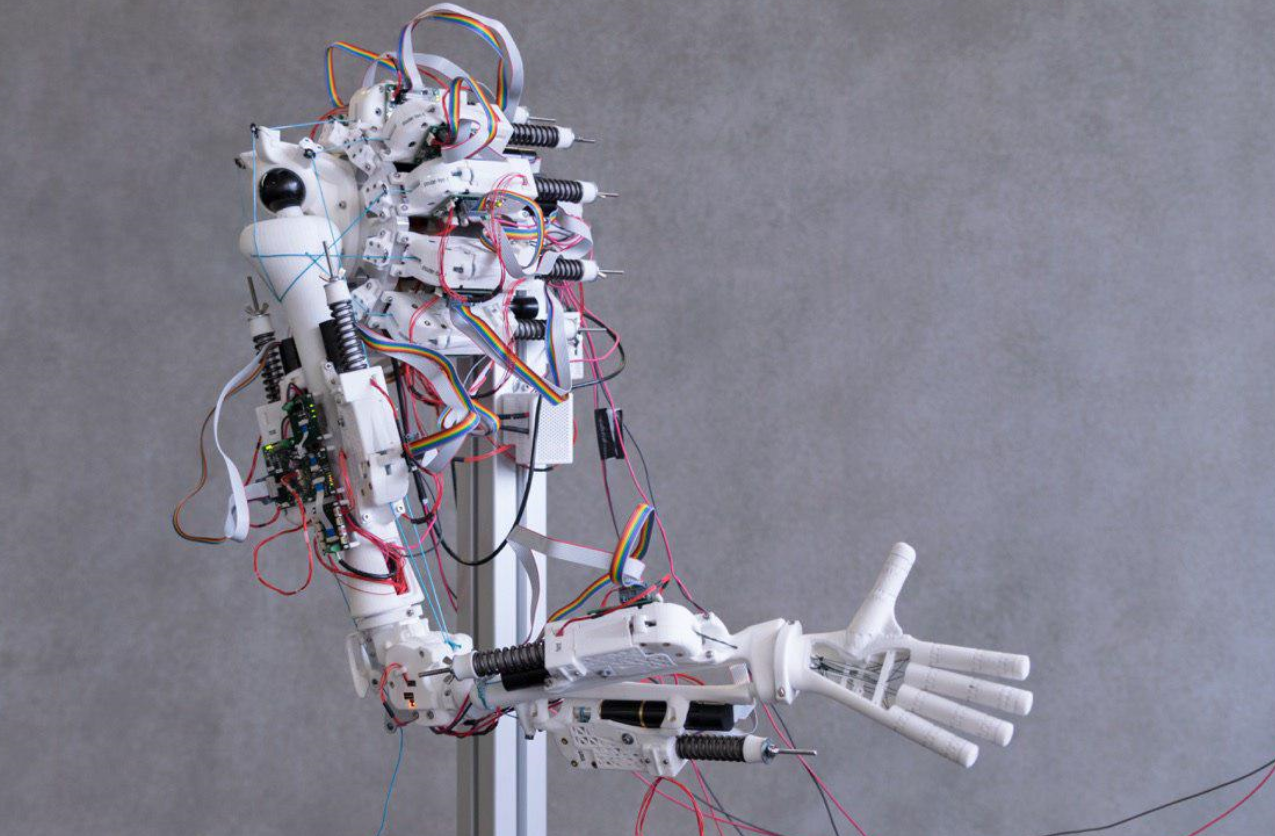
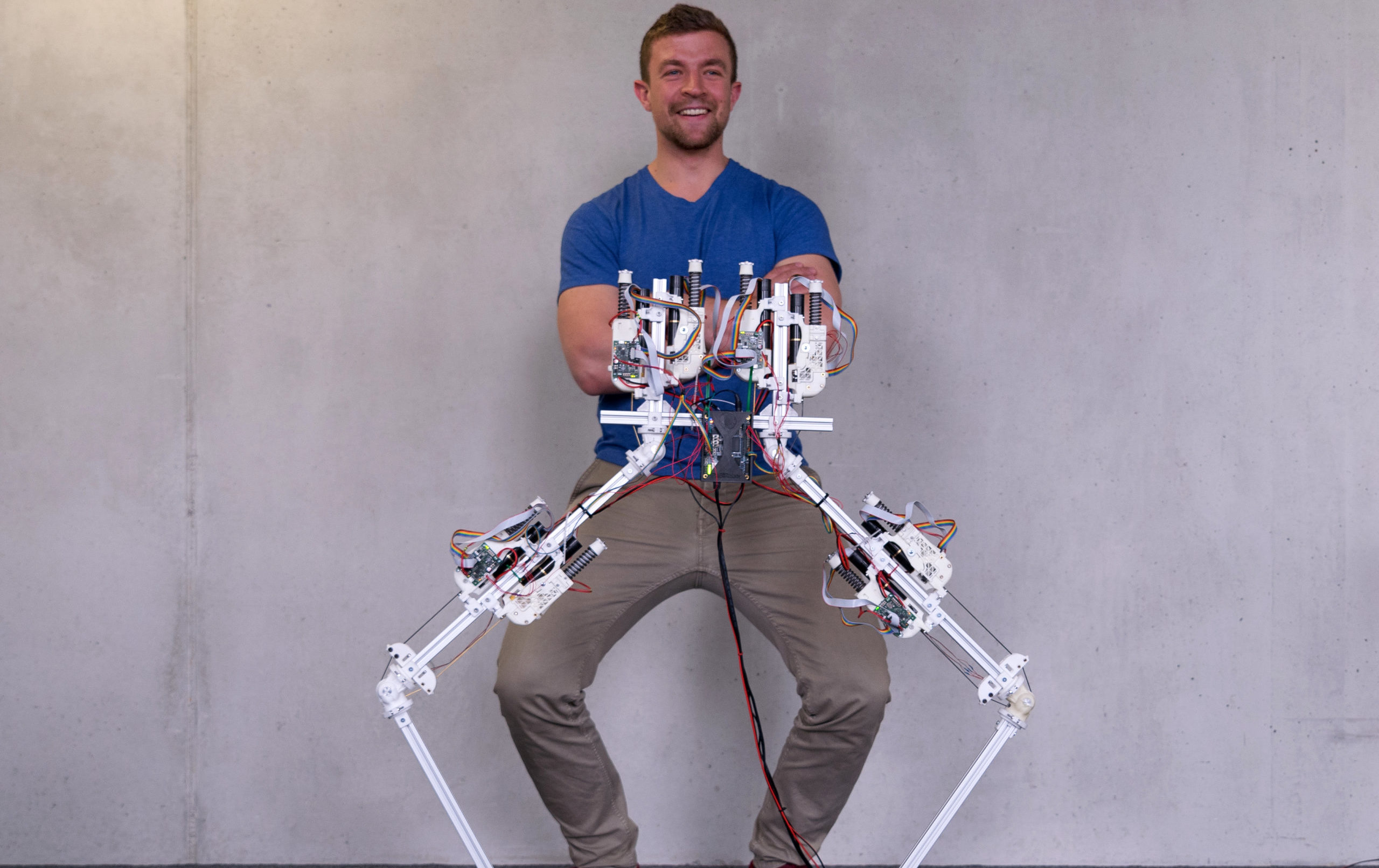
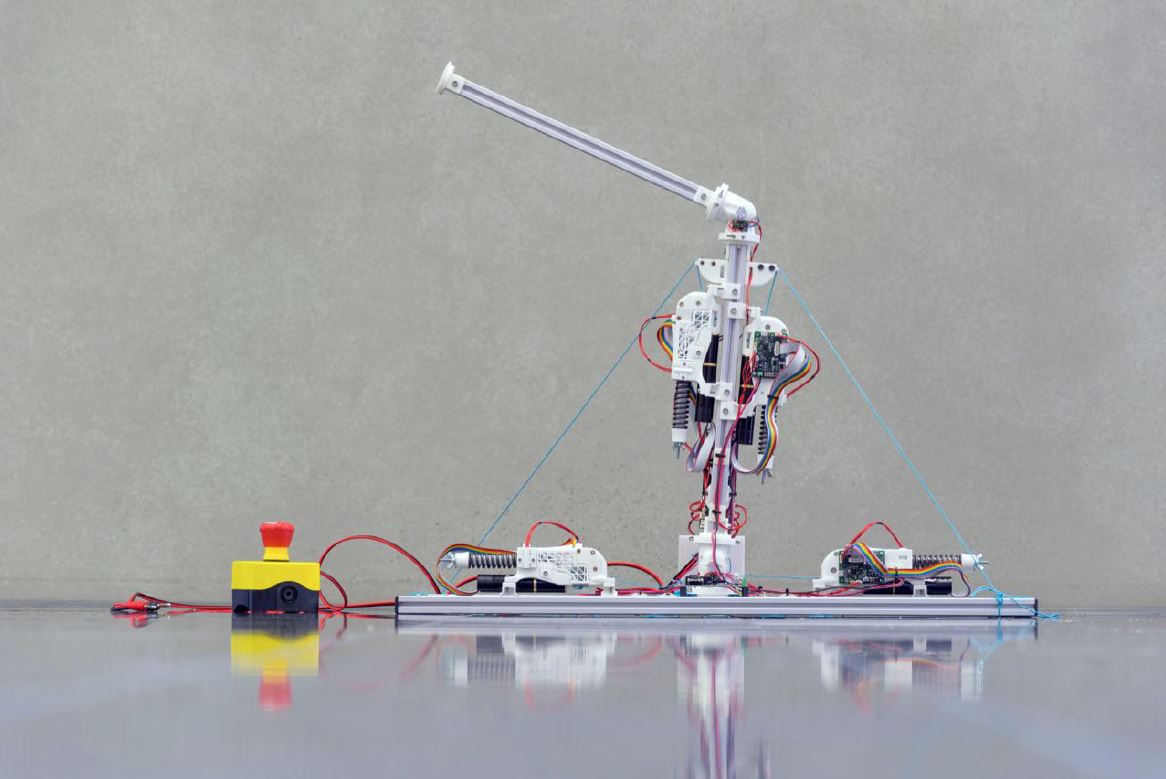
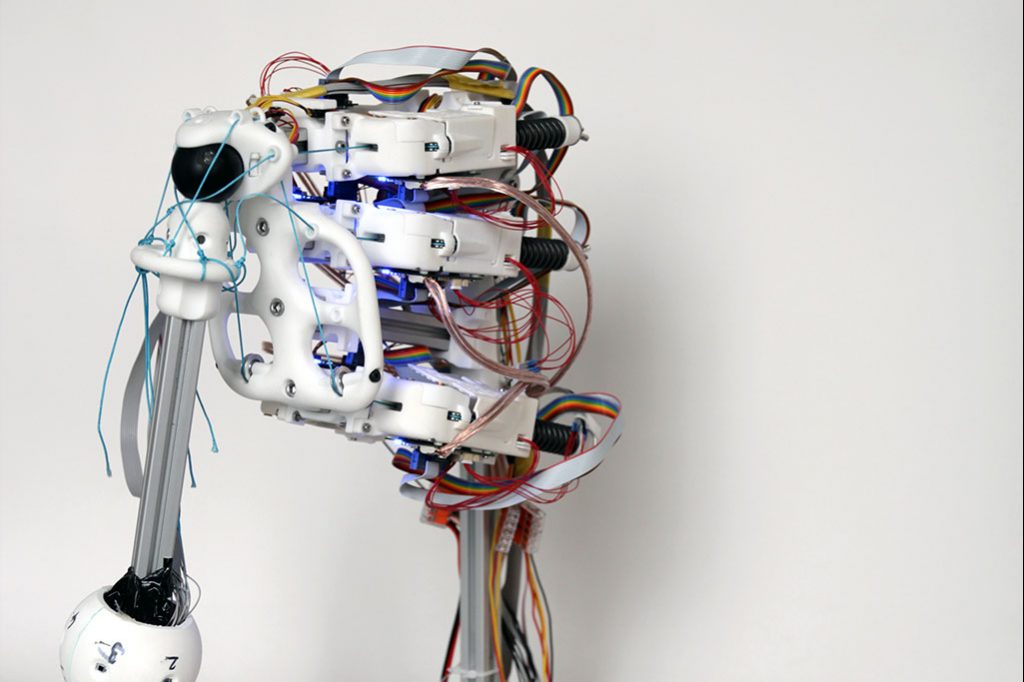
Full Humanoid Robots
Roboy is a series of musculoskeletal Robots developed since 2012. Junior and 2.0 are unique, whereas 3.0 was a twin from the start.
Roboy is a series of musculoskeletal Robots developed since 2012. Junior and 2.0 are unique, whereas 3.0 was a twin from the start.